|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
API for the DS18B20 1-Wire Temperature Sensor. More...
This driver supports, and was tested with, a DS18B20 with external power.
Multiple DS18B20 devices can be connected to this bus. This module will identify all such devices connected, and allow you to access them using an index starting at 0.
Parasitic power is not currently supported due to the very tight 10us limit on switching a GPIO properly to supply power during certain operations. For this reason, you should use external power for your sensors.
Setting the alarm values (Tl, Th) is also not supported, since this is only useful when doing a 1-wire device search looking for devices in an alarm state, a capability not yet supported in MRAA. In reality, this is trivial to handle yourself in your application.
This device requires the use of a TTL level UART (specifically through the UartOW MRAA context class) to provide access to a Dallas 1-wire bus. It is important to realize that the UART is only being used to provide an interface to devices on a Dallas 1-wire compliant bus.
A circuit like the following should be used for the UART interface (ASCII schematic - best viewed in a fixed monospace font):
-| U| (D1) A| TX—|<–+ R| | T| RX----—o-----—o >to 1-wire data bus -|
Vcc
|
o------------+
| |
R1 |
| o(+)
>1-wire---—o-----—o[DS18B20] o(-) | GND
D1 = 1N4148 R1 = 4.7K
The cathode of D1 is connected to the UART TX.
Public Member Functions | |
| DS18B20 (int uart=DS18B20_DEFAULT_UART) | |
| ~DS18B20 () | |
| void | init () |
| void | update (int index=-1) |
| float | getTemperature (unsigned int index, bool fahrenheit=false) |
| void | setResolution (unsigned int index, DS18B20_RESOLUTIONS_T res) |
| void | copyScratchPad (unsigned int index) |
| void | recallEEPROM (unsigned int index) |
| int | devicesFound () |
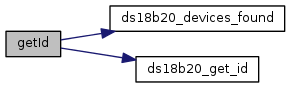
| std::string | getId (unsigned int index) |
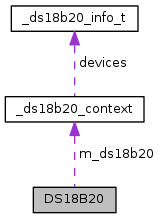
Protected Attributes | |
| ds18b20_context | m_ds18b20 |
| DS18B20 | ( | int | uart = DS18B20_DEFAULT_UART | ) |
DS18B20 object constructor
This method will search the 1-wire bus and store information on each device detected on the bus. If no devices are found, an exception is thrown. Once this function completes successfully, you can use devicesFound() to determine how many devices were detected.
| uart | Default UART to use (0 or 1). Default is 0. |

| void init | ( | ) |
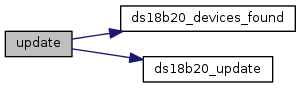
| void update | ( | int | index = -1 | ) |
Update our stored temperature for a device. This method must be called prior to getTemperature().
| index | The device index to access (starts at 0). Specify -1 to query all detected devices. Default: -1 |
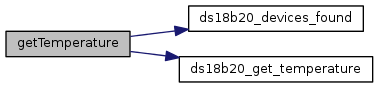
| float getTemperature | ( | unsigned int | index, |
| bool | fahrenheit = false |
||
| ) |
Get the current temperature. update() must have been called prior to calling this method.
| index | The device index to access (starts at 0). |
| fahrenheit | true to return the temperature in degrees fahrenheit, false to return the temperature in degrees celsius. The default is false (degrees Celsius). |
| void setResolution | ( | unsigned int | index, |
| DS18B20_RESOLUTIONS_T | res | ||
| ) |
Set the device resolution for a device. These devices support 9, 10, 11, and 12 bits of resolution, with the default from the factory at 12 bits.
| index | The device index to access (starts at 0). |
| res | One of the RESOLUTIONS_T values |

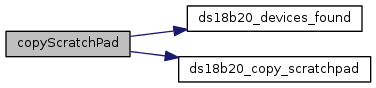
| void copyScratchPad | ( | unsigned int | index | ) |
Copy the device's scratchpad memory to the EEPROM. This includes the configuration byte (resolution).
| index | The device index to access (starts at 0). |
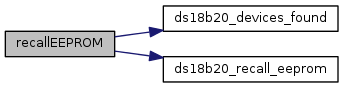
| void recallEEPROM | ( | unsigned int | index | ) |
Copy the device's EEPROM memory to the scratchpad. This method will return when the copy completes. This operation is performed by the device automatically on power up, so it is rarely needed.
| index | The device index to access (starts at 0). |
|
inline |
| string getId | ( | unsigned int | index | ) |
Return an 8 byte string representing the unique device ID (1-wire romcode) for a given device index.
| index | The device index to access (starts at 0). |

 1.8.11
1.8.11



