|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
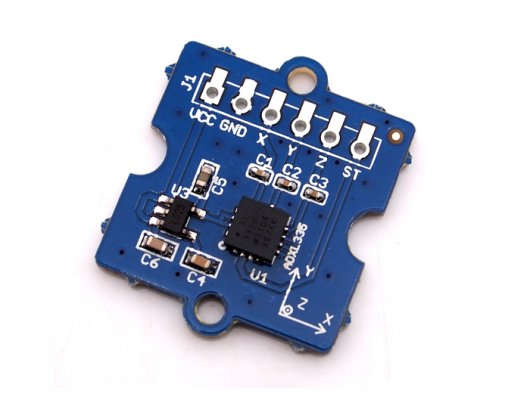
API for the ADXL335 3-Axis Analog Accelerometer. More...
UPM module for the ADXL335 3-axis analog accelerometer. This was tested on a Grove 3-axis Analog Accelerometer. It uses 3 analog pins, one for each axis: X, Y, and Z.
Public Member Functions | |
| ADXL335 (int pinX, int pinY, int pinZ, float aref=ADXL335_DEFAULT_AREF) | |
| ~ADXL335 () | |
| void | setZeroX (float zeroX) |
| void | setZeroY (float zeroY) |
| void | setZeroZ (float zeroZ) |
| void | values (int *xVal, int *yVal, int *zVal) |
| std::vector< int > | values () |
| void | acceleration (float *xAccel, float *yAccel, float *zAccel) |
| std::vector< float > | acceleration () |
| void | calibrate () |
| ADXL335 | ( | int | pinX, |
| int | pinY, | ||
| int | pinZ, | ||
| float | aref = ADXL335_DEFAULT_AREF |
||
| ) |
ADXL335 constructor
| pinX | Analog pin to use for X-axis |
| pinY | Analog pin to use for Y-axis |
| pinZ | Analog pin to use for Z-axis |
| aref | Analog reference voltage; default is 5.0v |
|
inline |
Sets the "zero" value of the X-axis, determined through calibration
| zeroX | "Zero" value of the X-axis |
|
inline |
Sets the "zero" value of the Y-axis, determined through calibration
| zeroY | "Zero" value of the Y-axis |
|
inline |
Sets the "zero" value of the Z-axis, determined through calibration
| zeroZ | "Zero" value of the Z-axis |
| void values | ( | int * | xVal, |
| int * | yVal, | ||
| int * | zVal | ||
| ) |
Gets the analog values for the 3 axes
| xVal | Pointer to the returned X-axis value |
| yVal | Pointer to the returned Y-axis value |
| zVal | Pointer to the returned Z-axis value |
| std::vector< int > values | ( | ) |
Gets the analog values for the 3 axes

| void acceleration | ( | float * | xAccel, |
| float * | yAccel, | ||
| float * | zAccel | ||
| ) |
Gets the acceleration along all 3 axes
| xAccel | Pointer to returned X-axis value |
| yAccel | Pointer to returned Y-axis value |
| zAccel | Pointer to returned Z-axis value |
| std::vector< float > acceleration | ( | ) |
Gets the acceleration along all 3 axes

| void calibrate | ( | ) |
While the sensor is still, measures the X-axis, Y-axis, and Z-axis values and uses those values as the zero values.

 1.8.11
1.8.11

