|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
Functions | |
| uint32_t | Device_Object_Instance_Number (void) |
| int | Device_Read_Property (BACNET_READ_PROPERTY_DATA *rpdata) |
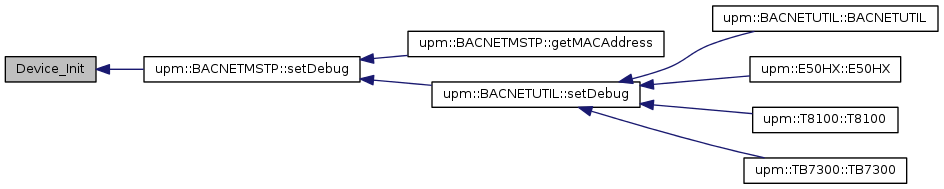
| void | Device_Init (object_functions_t *object_table) |
This section describes the fairly limited set of functions that link the BAC-stack handlers to the BACnet Object instances. All of these calls are situated in the Device Object, which "knows" how to reach its child Objects.
Most of these calls have a common operation:
| uint32_t Device_Object_Instance_Number | ( | void | ) |
Return the Object Instance number for our (single) Device Object. This is a key function, widely invoked by the handler code, since it provides "our" (ie, local) address.
| int Device_Read_Property | ( | BACNET_READ_PROPERTY_DATA * | rpdata | ) |
Looks up the requested Object and Property, and encodes its Value in an APDU.
If the Object or Property can't be found, sets the error class and code.
| rpdata | [in,out] Structure with the desired Object and Property info on entry, and APDU message on return. |
| void Device_Init | ( | object_functions_t * | object_table | ) |
Initialize the Device Object. Initialize the group of object helper functions for any supported Object. Initialize each of the Device Object child Object instances.
| object_table | [in,out] array of structure with object functions. Each Child Object must provide some implementation of each of these functions in order to properly support the default handlers. |

|
 1.8.11
1.8.11

