|
upm
0.3.2
Sensor/Actuator repository for libmraa (v0.7.2)
|
|
upm
0.3.2
Sensor/Actuator repository for libmraa (v0.7.2)
|
API for the NRF24L01 Transceiver Module. More...
This file defines the NRF24L01 interface for libnrf24l01
Public Member Functions | |
| NRF24L01 (uint8_t cs, uint8_t ce) | |
| ~NRF24L01 () | |
| std::string | name () |
| void | init (uint8_t chipSelect, uint8_t chipEnable) |
| void | configure () |
| void | send (uint8_t *value) |
| void | send () |
| void | setSourceAddress (uint8_t *addr) |
| void | setDestinationAddress (uint8_t *addr) |
| void | setBroadcastAddress (uint8_t *addr) |
| void | setPayload (uint8_t load) |
| bool | dataReady () |
| bool | dataSending () |
| void | getData (uint8_t *data) |
| uint8_t | getStatus () |
| bool | rxFifoEmpty () |
| void | rxPowerUp () |
| void | rxFlushBuffer () |
| void | txPowerUp () |
| void | powerDown () |
| void | setChannel (uint8_t channel) |
| void | setPower (power_t power) |
| uint8_t | setSpeedRate (speed_rate_t rate) |
| void | txFlushBuffer () |
| void | pollListener () |
| mraa_result_t | ceHigh () |
| mraa_result_t | ceLow () |
| mraa_result_t | csOn () |
| mraa_result_t | csOff () |
| void | setBeaconingMode () |
| void | sendBeaconingMsg (uint8_t *msg) |
Data Fields | |
| uint8_t | m_rxBuffer [MAX_BUFFER] |
| uint8_t | m_txBuffer [MAX_BUFFER] |
| uint8_t | m_bleBuffer [32] |
| funcPtrVoidVoid | dataRecievedHandler |
| NRF24L01 | ( | uint8_t | cs, |
| uint8_t | ce | ||
| ) |
Instantiates an NRF24l01 object
| cs | Chip select pin |
| ~NRF24L01 | ( | ) |
NRF24l01 object destructor
|
inline |
Returns the name of the component
| void init | ( | uint8_t | chipSelect, |
| uint8_t | chipEnable | ||
| ) |
Initializes needed GPIO pins and SPI
| chipSelect | Sets up the chip select pin |
| chipEnable | Sets up the chip enable pin |
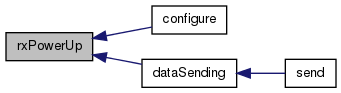
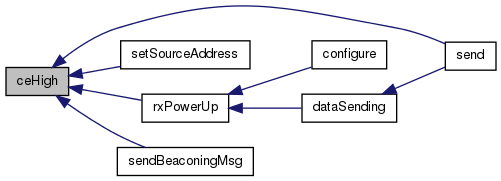
| void configure | ( | ) |
| void send | ( | uint8_t * | value | ) |
Sends the buffer data
| *value | Pointer to the buffer |
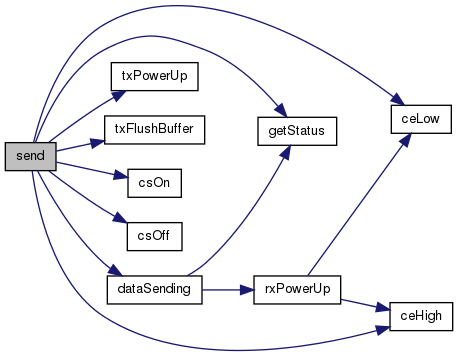
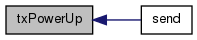
| void send | ( | ) |
Sends the data located in an inner bufer; the user must fill the m_txBuffer buffer
| void setSourceAddress | ( | uint8_t * | addr | ) |
Sets a receiving address of the device
| addr | 5-byte address |
| void setDestinationAddress | ( | uint8_t * | addr | ) |
Sets a recipient address. The nrfSend method sends the data buffer to this address
| addr | 5-byte address |
| void setBroadcastAddress | ( | uint8_t * | addr | ) |
Sets a broadcasting address
| addr | 5-byte address |
| void setPayload | ( | uint8_t | load | ) |
Sets the payload size
| load | Size of the payload (MAX 32) |
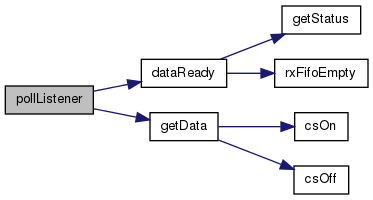
| bool dataReady | ( | ) |
Checks if the data has arrived

| bool dataSending | ( | ) |
Checks if the transceiver is in the sending mode

| void getData | ( | uint8_t * | data | ) |
Sinks all the arrived data into a provided buffer
| load | Size of the payload (MAX 32) |

| uint8_t getStatus | ( | ) |
Checks the transceiver state
| bool rxFifoEmpty | ( | ) |
Checks if the receive stack is empty

| void rxPowerUp | ( | ) |
Powers the receiver up
| void rxFlushBuffer | ( | ) |
Flushes the receive stack

| void txPowerUp | ( | ) |
Powers the transmitter up
| void powerDown | ( | ) |
Powers everything down

| void txFlushBuffer | ( | ) |
Flushes the transmit stack

| void pollListener | ( | ) |
Pulling the method listening for the arrived data, dataRecievedHandler is triggered if data arrives
| mraa_result_t ceHigh | ( | ) |
Sets the chip enable pin to HIGH
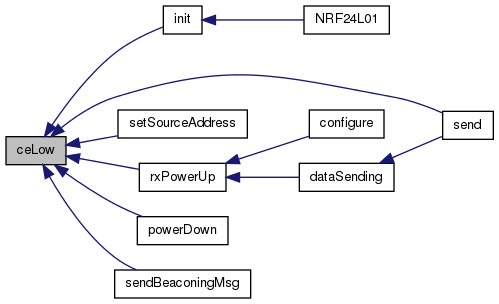
| mraa_result_t ceLow | ( | ) |
Sets the chip enable pin to LOW
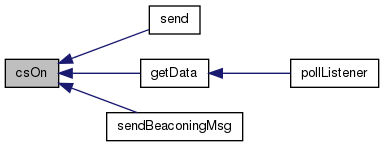
| mraa_result_t csOn | ( | ) |
Sets the chip select pin to LOW
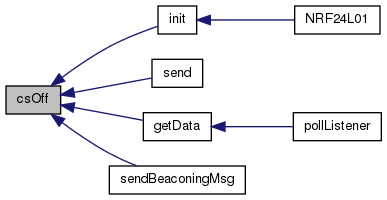
| mraa_result_t csOff | ( | ) |
Sets the chip select pin to HIGH
| void setBeaconingMode | ( | ) |
Configures the NRF24L01 transceiver to behave as a BLE (Bluetooth Low Energy) beaconing devcie.
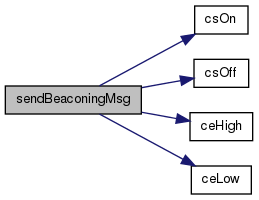
| void sendBeaconingMsg | ( | uint8_t * | msg | ) |
Beacons the provided message to BLE scanners.
| msg | Beacons the provided message (max length is 16 bytes) |
| uint8_t m_rxBuffer[MAX_BUFFER] |
Receive buffer
| uint8_t m_txBuffer[MAX_BUFFER] |
Transmit buffer
| uint8_t m_bleBuffer[32] |
BLE buffer
| funcPtrVoidVoid dataRecievedHandler |
Data arrived handler
 1.8.9.1
1.8.9.1