|
upm
0.5.1
Sensor/Actuator repository for libmraa (v0.9.1)
|
|
upm
0.5.1
Sensor/Actuator repository for libmraa (v0.9.1)
|
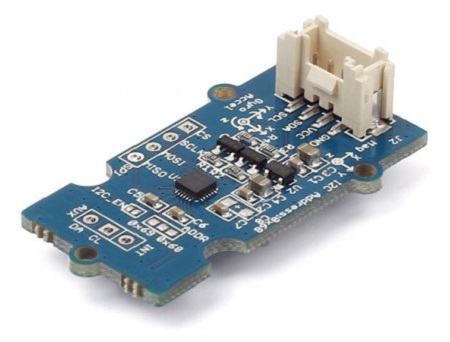
API for MPU9250 chip (Accelerometer, Gyro and Magnometer Sensor) More...
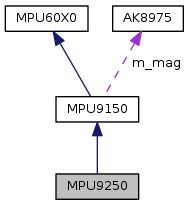
This module defines the MPU9250 interface for libmpu9150
Public Member Functions | |
| MPU9250 (int bus=MPU9250_I2C_BUS, int address=MPU9250_DEFAULT_I2C_ADDR, int magAddress=AK8975_DEFAULT_I2C_ADDR, bool enableAk8975=true) | |
| ~MPU9250 () | |
| float | getTemperature () |
 Public Member Functions inherited from MPU9150 Public Member Functions inherited from MPU9150 | |
| MPU9150 (int bus=MPU9150_I2C_BUS, int address=MPU9150_DEFAULT_I2C_ADDR, int magAddress=AK8975_DEFAULT_I2C_ADDR, bool enableAk8975=true) | |
| ~MPU9150 () | |
| bool | init () |
| void | update () |
| void | getMagnetometer (float *x, float *y, float *z) |
| Public Member Functions inherited from MPU60X0 | |
| MPU60X0 (int bus=MPU60X0_I2C_BUS, uint8_t address=MPU60X0_DEFAULT_I2C_ADDR) | |
| ~MPU60X0 () | |
| bool | init () |
| void | update () |
| uint8_t | readReg (uint8_t reg) |
| void | readRegs (uint8_t reg, uint8_t *buffer, int len) |
| bool | writeReg (uint8_t reg, uint8_t val) |
| bool | setSleep (bool enable) |
| bool | setClockSource (CLKSEL_T clk) |
| bool | setGyroscopeScale (FS_SEL_T scale) |
| bool | setAccelerometerScale (AFS_SEL_T scale) |
| bool | setDigitalLowPassFilter (DLPF_CFG_T dlp) |
| bool | setSampleRateDivider (uint8_t div) |
| uint8_t | getSampleRateDivider () |
| void | getAccelerometer (float *x, float *y, float *z) |
| void | getGyroscope (float *x, float *y, float *z) |
| bool | enableTemperatureSensor (bool enable) |
| bool | setExternalSync (EXT_SYNC_SET_T val) |
| bool | enableI2CBypass (bool enable) |
| bool | setMotionDetectionThreshold (uint8_t thr) |
| uint8_t | getInterruptStatus () |
| bool | setInterruptEnables (uint8_t enables) |
| uint8_t | getInterruptEnables () |
| bool | setInterruptPinConfig (uint8_t cfg) |
| uint8_t | getInterruptPinConfig () |
| void | installISR (int gpio, mraa::Edge level, void(*isr)(void *), void *arg) |
| void | uninstallISR () |
Additional Inherited Members | |
| Public Types inherited from MPU60X0 | |
| enum | MPU60X0_REG_T { REG_SELF_TEST_X = 0x0d, REG_SELF_TEST_Y = 0x0e, REG_SELF_TEST_Z = 0x0f, REG_SELF_TEST_A = 0x10, REG_SMPLRT_DIV = 0x19, REG_CONFIG = 0x1a, REG_GYRO_CONFIG = 0x1b, REG_ACCEL_CONFIG = 0x1c, REG_FF_THR = 0x1d, REG_FF_DUR = 0x1e, REG_MOT_THR = 0x1f, REG_MOT_DUR = 0x20, REG_ZRMOT_THR = 0x21, REG_ZRMOT_DUR = 0x22, REG_FIFO_EN = 0x23, REG_I2C_MST_CTRL = 0x24, REG_I2C_SLV0_ADDR = 0x25, REG_I2C_SLV0_REG = 0x26, REG_I2C_SLV0_CTRL = 0x27, REG_I2C_SLV1_ADDR = 0x28, REG_I2C_SLV1_REG = 0x29, REG_I2C_SLV1_CTRL = 0x2a, REG_I2C_SLV2_ADDR = 0x2b, REG_I2C_SLV2_REG = 0x2c, REG_I2C_SLV2_CTRL = 0x2d, REG_I2C_SLV3_ADDR = 0x2e, REG_I2C_SLV3_REG = 0x2f, REG_I2C_SLV3_CTRL = 0x30, REG_I2C_SLV4_ADDR = 0x31, REG_I2C_SLV4_REG = 0x32, REG_I2C_SLV4_DO = 0x33, REG_I2C_SLV4_CTRL = 0x34, REG_I2C_SLV4_DI = 0x35, REG_I2C_MST_STATUS = 0x36, REG_INT_PIN_CFG = 0x37, REG_INT_ENABLE = 0x38, REG_INT_STATUS = 0x3a, REG_ACCEL_XOUT_H = 0x3b, REG_ACCEL_XOUT_L = 0x3c, REG_ACCEL_YOUT_H = 0x3d, REG_ACCEL_YOUT_L = 0x3e, REG_ACCEL_ZOUT_H = 0x3f, REG_ACCEL_ZOUT_L = 0x40, REG_TEMP_OUT_H = 0x41, REG_TEMP_OUT_L = 0x42, REG_GYRO_XOUT_H = 0x43, REG_GYRO_XOUT_L = 0x44, REG_GYRO_YOUT_H = 0x45, REG_GYRO_YOUT_L = 0x46, REG_GYRO_ZOUT_H = 0x47, REG_GYRO_ZOUT_L = 0x48, REG_EXT_SENS_DATA_00 = 0x49, REG_EXT_SENS_DATA_01 = 0x4a, REG_EXT_SENS_DATA_02 = 0x4b, REG_EXT_SENS_DATA_03 = 0x4c, REG_EXT_SENS_DATA_04 = 0x4d, REG_EXT_SENS_DATA_05 = 0x4e, REG_EXT_SENS_DATA_06 = 0x4f, REG_EXT_SENS_DATA_07 = 0x50, REG_EXT_SENS_DATA_08 = 0x51, REG_EXT_SENS_DATA_09 = 0x52, REG_EXT_SENS_DATA_10 = 0x53, REG_EXT_SENS_DATA_11 = 0x54, REG_EXT_SENS_DATA_12 = 0x55, REG_EXT_SENS_DATA_13 = 0x56, REG_EXT_SENS_DATA_14 = 0x57, REG_EXT_SENS_DATA_15 = 0x58, REG_EXT_SENS_DATA_16 = 0x59, REG_EXT_SENS_DATA_17 = 0x5a, REG_EXT_SENS_DATA_18 = 0x5b, REG_EXT_SENS_DATA_19 = 0x5c, REG_EXT_SENS_DATA_20 = 0x5d, REG_EXT_SENS_DATA_21 = 0x5e, REG_EXT_SENS_DATA_22 = 0x5f, REG_EXT_SENS_DATA_23 = 0x60, REG_MOT_DETECT_STATUS = 0x61, REG_I2C_SLV0_DO = 0x63, REG_I2C_SLV1_DO = 0x64, REG_I2C_SLV2_DO = 0x65, REG_I2C_SLV3_DO = 0x66, REG_I2C_MST_DELAY_CTRL = 0x67, REG_SIGNAL_PATH_RESET = 0x68, REG_MOT_DETECT_CTRL = 0x69, REG_USER_CTRL = 0x6a, REG_PWR_MGMT_1 = 0x6b, REG_PWR_MGMT_2 = 0x6c, REG_FIFO_COUNTH = 0x72, REG_FIFO_COUNTL = 0x73, REG_FIFO_R_W = 0x74, REG_WHO_AM_I = 0x75 } |
| enum | CONFIG_BITS_T { CONFIG_DLPF_CFG0 = 0x01, CONFIG_DLPF_CFG1 = 0x02, CONFIG_DLPF_CFG2 = 0x04, _CONFIG_DLPF_SHIFT = 0, _CONFIG_DLPF_MASK = 7, CONFIG_EXT_SYNC_SET0 = 0x08, CONFIG_EXT_SYNC_SET1 = 0x10, CONFIG_EXT_SYNC_SET2 = 0x20, _CONFIG_EXT_SYNC_SET_SHIFT = 3, _CONFIG_EXT_SYNC_SET_MASK = 7 } |
| enum | DLPF_CFG_T { DLPF_260_256 = 0, DLPF_184_188 = 1, DLPF_94_98 = 2, DLPF_44_42 = 3, DLPF_21_20 = 4, DLPF_10_10 = 5, DLPF_5_5 = 6, DLPF_RESERVED = 7 } |
| enum | EXT_SYNC_SET_T { EXT_SYNC_DISABLED = 0, EXT_SYNC_TEMP_OUT = 1, EXT_SYNC_GYRO_XOUT = 2, EXT_SYNC_GYRO_YOUT = 3, EXT_SYNC_GYRO_ZOUT = 4, EXT_SYNC_ACCEL_XOUT = 5, EXT_SYNC_ACCEL_YOUT = 6, EXT_SYNC_ACCEL_ZOUT = 7 } |
| enum | GRYO_CONFIG_BITS_T { FS_SEL0 = 0x08, FS_SEL1 = 0x10, _FS_SEL_SHIFT = 3, _FS_SEL_MASK = 3, ZG_ST = 0x20, YG_ST = 0x40, XG_ST = 0x80 } |
| enum | FS_SEL_T { FS_250 = 0, FS_500 = 1, FS_1000 = 2, FS_2000 = 3 } |
| enum | ACCEL_CONFIG_BITS_T { AFS_SEL0 = 0x08, AFS_SEL1 = 0x10, _AFS_SEL_SHIFT = 3, _AFS_SEL_MASK = 3, ZA_ST = 0x20, YA_ST = 0x40, XA_ST = 0x80 } |
| enum | AFS_SEL_T { AFS_2 = 0, AFS_4 = 1, AFS_8 = 2, AFS_16 = 3 } |
| enum | FIFO_EN_BITS_T { SLV0_FIFO_EN = 0x01, SLV1_FIFO_EN = 0x02, SLV2_FIFO_EN = 0x04, ACCEL_FIFO_EN = 0x08, ZG_FIFO_EN = 0x10, YG_FIFO_EN = 0x20, XG_FIFO_EN = 0x40, TEMP_FIFO_EN = 0x80 } |
| enum | I2C_MST_CTRL_BITS_T { I2C_MST_CLK0 = 0x01, I2C_MST_CLK1 = 0x02, I2C_MST_CLK2 = 0x04, I2C_MST_CLK3 = 0x08, _I2C_MST_CLK_SHIFT = 0, _I2C_MST_CLK_MASK = 15, I2C_MST_P_NSR = 0x10, SLV_3_FIFO_EN = 0x20, WAIT_FOR_ES = 0x40, MULT_MST_EN = 0x80 } |
| enum | I2C_MST_CLK_T { MST_CLK_348 = 0, MST_CLK_333 = 1, MST_CLK_320 = 2, MST_CLK_308 = 3, MST_CLK_296 = 4, MST_CLK_286 = 5, MST_CLK_276 = 6, MST_CLK_267 = 7, MST_CLK_258 = 8, MST_CLK_500 = 9, MST_CLK_471 = 10, MST_CLK_444 = 11, MST_CLK_421 = 12, MST_CLK_400 = 13, MST_CLK_381 = 14, MST_CLK_364 = 15 } |
| enum | I2C_SLV_ADDR_BITS_T { I2C_SLV_ADDR0 = 0x01, I2C_SLV_ADDR1 = 0x02, I2C_SLV_ADDR2 = 0x04, I2C_SLV_ADDR3 = 0x08, I2C_SLV_ADDR4 = 0x10, I2C_SLV_ADDR5 = 0x20, I2C_SLV_ADDR6 = 0x40, _I2C_SLV_ADDR_SHIFT = 0, _I2C_SLV_ADDR_MASK = 127, I2C_SLV_RW = 0x80 } |
| enum | I2C_SLV_CTRL_BITS_T { I2C_SLV_LEN0 = 0x01, I2C_SLV_LEN1 = 0x02, I2C_SLV_LEN2 = 0x04, I2C_SLV_LEN3 = 0x08, _I2C_SLV_LEN_SHIFT = 0, _I2C_SLV_LEN_MASK = 15, I2C_SLV_GRP = 0x10, I2C_SLV_REG_DIS = 0x20, I2C_SLV_BYTE_SW = 0x40, I2C_SLV_EN = 0x80 } |
| enum | I2C_SLV4_CTRL_BITS_T { I2C_MST_DLY0 = 0x01, I2C_MST_DLY1 = 0x02, I2C_MST_DLY2 = 0x04, I2C_MST_DLY3 = 0x08, I2C_MST_DLY4 = 0x10, _I2C_MST_DLY_SHIFT = 0, _I2C_MST_DLY_MASK = 31, I2C_SLV4_REG_DIS = 0x20, I2C_SLV4_INT_EN = 0x40, I2C_SLV4_EN = 0x80 } |
| enum | I2C_MST_STATUS_BITS_T { I2C_SLV0_NACK = 0x01, I2C_SLV1_NACK = 0x02, I2C_SLV2_NACK = 0x04, I2C_SLV3_NACK = 0x08, I2C_SLV4_NACK = 0x10, I2C_LOST_ARB = 0x20, I2C_SLV4_DONE = 0x40, PASS_THROUGH = 0x80 } |
| enum | INT_PIN_CFG_BITS_T { CLKOUT_EN = 0x01, I2C_BYPASS_ENABLE = 0x02, FSYNC_INT_EN = 0x04, FSYNC_INT_LEVEL = 0x08, INT_RD_CLEAR = 0x10, LATCH_INT_EN = 0x20, INT_OPEN = 0x40, INT_LEVEL = 0x80 } |
| enum | INT_ENABLE_BITS_T { DATA_RDY_EN = 0x01, I2C_MST_INT_EN = 0x08, FIFO_OFLOW_EN = 0x10, ZMOT_EN = 0x20, MOT_EN = 0x40, FF_EN = 0x80 } |
| enum | INT_STATUS_BITS_T { DATA_RDY_INT = 0x01, I2C_MST_INT = 0x08, FIFO_OFLOW_INT = 0x10, ZMOT_INT = 0x20, MOT_INT = 0x40, FF_INT = 0x80 } |
| enum | MOT_DETECT_STATUS_BITS_T { MOT_ZRMOT = 0x01, MOT_ZPOS = 0x04, MOT_ZNEG = 0x08, MOT_YPOS = 0x10, MOT_YNEG = 0x20, MOT_XPOS = 0x40, MOT_XNEG = 0x80 } |
| enum | MST_DELAY_CTRL_BITS_T { I2C_SLV0_DLY_EN = 0x01, I2C_SLV1_DLY_EN = 0x02, I2C_SLV2_DLY_EN = 0x04, I2C_SLV3_DLY_EN = 0x08, I2C_SLV4_DLY_EN = 0x10, DELAY_ES_SHADOW = 0x80 } |
| enum | SIGNAL_PATH_RESET_BITS_T { TEMP_RESET = 0x01, ACCEL_RESET = 0x02, GYRO_RESET = 0x04 } |
| enum | MOT_DETECT_CTRL_BITS_T { MOT_COUNT0 = 0x01, MOT_COUNT1 = 0x02, _MOT_COUNT_SHIFT = 0, _MOT_COUNT_MASK = 3, FF_COUNT0 = 0x04, FF_COUNT1 = 0x08, _FF_COUNT_SHIFT = 2, _FF_COUNT_MASK = 3, ACCEL_ON_DELAY0 = 0x10, ACCEL_ON_DELAY1 = 0x20, _ACCEL_ON_DELAY_SHIFT = 4, _ACCEL_ON_DELAY_MASK = 3 } |
| enum | MOT_FF_COUNT_T { COUNT_0 = 0, COUNT_1 = 1, COUNT_2 = 2, COUNT_4 = 3 } |
| enum | ACCEL_ON_DELAY_T { ON_DELAY_0 = 0, ON_DELAY_1 = 1, ON_DELAY_2 = 2, ON_DELAY_3 = 3 } |
| enum | USER_CTRL_BITS_T { SIG_COND_RESET = 0x01, I2C_MST_RESET = 0x02, FIFO_RESET = 0x04, I2C_IF_DIS = 0x10, I2C_MST_EN = 0x20, FIFO_EN = 0x40 } |
| enum | PWR_MGMT_1_BITS_T { CLKSEL0 = 0x01, CLKSEL1 = 0x02, CLKSEL2 = 0x04, _CLKSEL_SHIFT = 0, _CLKSEL_MASK = 7, TEMP_DIS = 0x08, PWR_CYCLE = 0x20, PWR_SLEEP = 0x40, DEVICE_RESET = 0x80 } |
| enum | CLKSEL_T { INT_8MHZ = 0, PLL_XG = 1, PLL_YG = 2, PLL_ZG = 3, PLL_EXT_32KHZ = 4, PLL_EXT_19MHZ = 5, CLK_STOP = 7 } |
| enum | PWR_MGMT_2_BITS_T { STBY_ZG = 0x01, STBY_YG = 0x02, STBY_XG = 0x04, STBY_ZA = 0x08, STBY_YA = 0x10, STBY_XA = 0x20, LP_WAKE_CTRL0 = 0x40, LP_WAKE_CTRL1 = 0x80, _LP_WAKE_CTRL_SHIFT = 6, _LP_WAKE_CTRL_MASK = 3 } |
| enum | LP_WAKE_CRTL_T { LP_WAKE_1_25 = 0, LP_WAKE_5 = 1, LP_WAKE_20 = 2, LP_WAKE_40 = 3 } |
| Protected Attributes inherited from MPU9150 | |
| AK8975 * | m_mag |
| Protected Attributes inherited from MPU60X0 | |
| float | m_accelX |
| float | m_accelY |
| float | m_accelZ |
| float | m_gyroX |
| float | m_gyroY |
| float | m_gyroZ |
| float | m_temp |
| float | m_accelScale |
| float | m_gyroScale |
| MPU9250 | ( | int | bus = MPU9250_I2C_BUS, |
| int | address = MPU9250_DEFAULT_I2C_ADDR, |
||
| int | magAddress = AK8975_DEFAULT_I2C_ADDR, |
||
| bool | enableAk8975 = true |
||
| ) |
MPU9250 constructor
| bus | I2C bus to use |
| address | The address for this device |
| magAddress | The address of the connected magnetometer |
| enableAk8975 | Enables i2c bypass mode for magnetometer, default is true |
|
virtual |
get the temperature value
Reimplemented from MPU60X0.

 1.8.6
1.8.6

