|
upm
0.7.1
Sensor/Actuator repository for libmraa (v1.0.0)
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Macros Groups Pages
|
upm
0.7.1
Sensor/Actuator repository for libmraa (v1.0.0)
|
L3GD20 Tri-axis Digital Gyroscope API. More...
The L3GD20 The L3GD20 is a low-power three-axis angular rate sensor.
Data Structures | |
| struct | filter_median_t |
| struct | gyro_cal_t |
Public Member Functions | |
| L3GD20 (int device) | |
| ~L3GD20 () | |
| void | installISR (void(*isr)(char *), void *arg) |
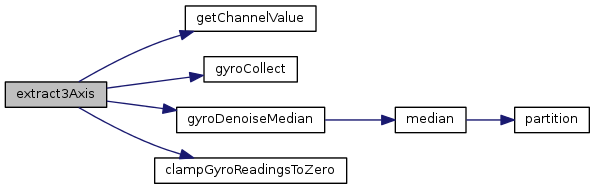
| int64_t | getChannelValue (unsigned char *input, mraa_iio_channel *chan) |
| bool | enableBuffer (int length) |
| bool | disableBuffer () |
| bool | setScale (const float scale) |
| bool | setSamplingFrequency (const float sampling_frequency) |
| bool | enable3AxisChannel () |
| bool | extract3Axis (char *data, float *x, float *y, float *z) |
| void | initCalibrate () |
| bool | getCalibratedStatus () |
| void | getCalibratedData (float *bias_x, float *bias_y, float *bias_z) |
| void | loadCalibratedData (float bias_x, float bias_y, float bias_z) |
| bool | gyroCollect (float x, float y, float z) |
| void | gyroDenoiseMedian (float *x, float *y, float *z) |
| float | median (float *queue, unsigned int size) |
| unsigned int | partition (float *list, unsigned int left, unsigned int right, unsigned int pivot_index) |
| void | clampGyroReadingsToZero (float *x, float *y, float *z) |
| L3GD20 | ( | int | device | ) |
L3GD20 Tri-axis Digital Gyroscope
| iio | device number |

| void installISR | ( | void(*)(char *) | isr, |
| void * | arg | ||
| ) |
Installs an interrupt service routine (ISR) to be called when an interrupt occurs
| interrupt | channel |
| fptr | Pointer to a function to be called on interrupt |
| arg | Pointer to an object to be supplied as an argument to the ISR. |
| int64_t getChannelValue | ( | unsigned char * | input, |
| mraa_iio_channel * | chan | ||
| ) |
Extract the channel value based on channel type
| input | Channel data |
| chan | MRAA iio-layer channel info |

| bool enableBuffer | ( | int | length | ) |
Enable trigger buffer
| trigger | buffer length in string |
| bool disableBuffer | ( | ) |
Disable trigger buffer
| bool setScale | ( | const float | scale | ) |
Set scale
| scale | in string |
| bool setSamplingFrequency | ( | const float | sampling_frequency | ) |
Set sampling frequency
| sampling | frequency in string |
| bool enable3AxisChannel | ( | ) |
Enable 3 axis scan element
| bool extract3Axis | ( | char * | data, |
| float * | x, | ||
| float * | y, | ||
| float * | z | ||
| ) |
Process enabled channel buffer and return x, y, z axis
| data | Enabled channel data, 6 bytes, each axis 2 bytes |
| x | X-Axis |
| y | Y-Axis |
| z | Z-Axis |
| void initCalibrate | ( | ) |
Reset calibration data and start collect calibration data again

| bool getCalibratedStatus | ( | ) |
Get calibrated status, return true if calibrate successfully
| void getCalibratedData | ( | float * | bias_x, |
| float * | bias_y, | ||
| float * | bias_z | ||
| ) |
Get calibrated data
| void loadCalibratedData | ( | float | bias_x, |
| float | bias_y, | ||
| float | bias_z | ||
| ) |
Load calibrated data
| bool gyroCollect | ( | float | x, |
| float | y, | ||
| float | z | ||
| ) |
Calibrate gyro
| x | X-Axis |
| y | Y-Axis |
| z | Z-Axis |

| void gyroDenoiseMedian | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
Denoise gyro
| x | X-Axis |
| y | Y-Axis |
| z | Z-Axis |


| float median | ( | float * | queue, |
| unsigned int | size | ||
| ) |
median algorithm
| queue | |
| size |


| unsigned int partition | ( | float * | list, |
| unsigned int | left, | ||
| unsigned int | right, | ||
| unsigned int | pivot_index | ||
| ) |
partition algorithm
| list | |
| left | |
| right | |
| pivot_index |

| void clampGyroReadingsToZero | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
Clamp Gyro Readings to Zero
| x | X-Axis |
| y | Y-Axis |
| z | Z-Axis |

 1.8.6
1.8.6