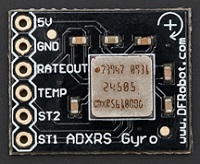
DFRobot ADXRS610 Gyro Beakout board.
More...
The ADXRS610 is a MEMS based single axis gyroscope with a range of +/- 300 degrees/sec. It also incorporates a temperature sensing unit that can be used for advanced calibration.
This sensor returns an analog voltage proportional to the rotation about the Z-axis in degrees/sec. The temperature component returns a proportional analog values in degrees C.
This driver was developed using the DFRobot ADXRS610 Gyro Beakout board.
while (shouldRun)
{
usleep(100000);
}
|
|
mraa::Aio | m_aioData |
| |
|
mraa::Aio | m_aioTemp |
| |
| ADXRS610 |
( |
int |
dPin, |
|
|
int |
tPin, |
|
|
float |
aref = 5.0 |
|
) |
| |
ADXRS610 constructor
- Parameters
-
| dPin | Analog pin to use for DATAOUT |
| tPin | Analog pin to use for temperature measurement |
| aref | Analog reference voltage; default is 5.0 V |
Returns the voltage detected on the DATA analog pin
- Returns
- The detected voltage
| float getTemperatureVolts |
( |
| ) |
|
Returns the voltage detected on the TEMP analog pin
- Returns
- The detected voltage
| void setDeadband |
( |
float |
deadband | ) |
|
|
inline |
This method allows you to specify a deadband region around the zero point of the gyro (at rest). This can be used as a primitive filter to ignore movment around the zero point.
- Parameters
-
| deadband | The voltage around the zero point which will be ignored |
| void setZeroPoint |
( |
float |
zeroPoint | ) |
|
|
inline |
Set the zero point. This is the point measured and averaged when the sensor is not moving. It is set at construction time (averaged over a number of samples), but can be overridden here.
- Parameters
-
| zeroPoint | The averaged zero point of the sensor at rest |
| float calibrateZeroPoint |
( |
unsigned int |
samples = 50 | ) |
|
This method samples the data pin samples times to produce an average. This value can then be used as the zero point (setZeroPoint()).
- Parameters
-
| samples | the number of samples to take an average over. The default is 50. |
- Returns
- the average of the reading over samples times.
Return the zero point value.
- Returns
- the current zero point value
Return the measured temperature in Celsius. Note, the datasheet says that this value is very repeatable, but is not an accurate absolute temperature.
- Returns
- the current temperature in C
| float getAngularVelocity |
( |
| ) |
|
Return the measured angular velocity in degrees/sec.
- Returns
- the current angular velocity in degrees/sec
The documentation for this class was generated from the following files:










 1.8.6
1.8.6