|
upm
1.3.0
Sensor/Actuator repository for libmraa (v1.7.0)
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Macros Groups Pages
|
upm
1.3.0
Sensor/Actuator repository for libmraa (v1.7.0)
|
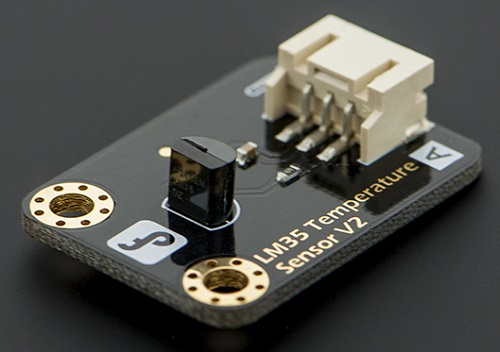
API for the DFRobot LM35 Linear Temperature Sensor. More...
This sensor returns an analog voltage proportional to the temperature of the ambient environment.
It has a range of 2C to 150C.
This driver was developed using the DFRobot LM35 Linear Temperature Sensor
Public Member Functions | |
| LM35 (int pin, float aref=5.0) | |
| ~LM35 () | |
| float | getTemperature () |
| void | setScale (float scale) |
| void | setOffset (float offset) |
Protected Attributes | |
| lm35_context | m_lm35 |
| LM35 | ( | int | pin, |
| float | aref = 5.0 |
||
| ) |
LM35 constructor
| pin | Analog pin to use |
| aref | Analog reference voltage; default is 5.0 V |
| float getTemperature | ( | void | ) |
Returns the temperature in degrees Celsius

| void setScale | ( | float | scale | ) |
Set sensor scale. This scale is applied to the return values before the offset is applied. Default is 1.0.
| scale | Scale to apply. |

| void setOffset | ( | float | offset | ) |
Set sensor offset. This offset is applied to the return values before scaling. Default is 0.0.
| offset | Offset to apply. |

 1.8.6
1.8.6
