|
upm
1.3.0
Sensor/Actuator repository for libmraa (v1.7.0)
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Macros Groups Pages
|
upm
1.3.0
Sensor/Actuator repository for libmraa (v1.7.0)
|
An example using analog mode
Interesting An example using UART mode
Interesting
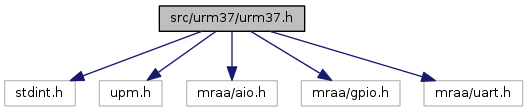
Go to the source code of this file.
Data Structures | |
| struct | _urm37_context |
Functions | |
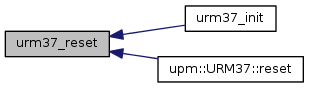
| urm37_context | urm37_init (uint8_t a_pin, uint8_t reset_pin, uint8_t trigger_pin, float a_ref, uint8_t uart, bool analog_mode) |
| void | urm37_close (urm37_context dev) |
| upm_result_t | urm37_reset (urm37_context dev) |
| upm_result_t | urm37_get_distance (urm37_context dev, float *distance, int degrees) |
| upm_result_t | urm37_get_temperature (urm37_context dev, float *temperature) |
| upm_result_t | urm37_read_eeprom (urm37_context dev, uint8_t addr, uint8_t *value) |
| upm_result_t | urm37_write_eeprom (urm37_context dev, uint8_t addr, uint8_t value) |
| upm_result_t | urm37_send_command (urm37_context dev, char *cmd, char *response) |
Typedefs | |
| typedef struct _urm37_context * | urm37_context |
| urm37_context urm37_init | ( | uint8_t | a_pin, |
| uint8_t | reset_pin, | ||
| uint8_t | trigger_pin, | ||
| float | a_ref, | ||
| uint8_t | uart, | ||
| bool | analog_mode | ||
| ) |
URM37 Initializer
| a_pin | Analog pin to use. Ignored in UART mode. |
| reset_pin | GPIO pin to use for reset |
| trigger_pin | GPIO pin to use for triggering a distance measurement. Ignored in UART mode. |
| a_ref | The analog reference voltage. Ignored in UART mode. |
| uart | Default UART to use (0 or 1). Ignored in analog mode. |
| mode | true for analog mode, false otherwise. |
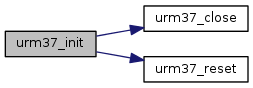
| void urm37_close | ( | urm37_context | dev | ) |
URM37 sensor close function
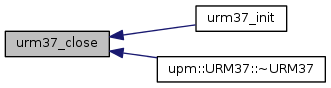
| upm_result_t urm37_reset | ( | urm37_context | dev | ) |
Reset the device. This will take approximately 3 seconds to complete.
| dev | sensor context |
| upm_result_t urm37_get_distance | ( | urm37_context | dev, |
| float * | distance, | ||
| int | degrees | ||
| ) |
Get the distance measurement. A return value of 65535.0 in UART mode indicates an invalid measurement.
| dev | sensor context |
| distance | A pointer to a float that will contain the distance in CM if the measurement is successful. |
| degrees | In UART mode, this specifies the degrees to turn an attached PWM servo connected to the MOTO output on the URM37. Valid values are 0-270. This option is ignored in analog mode. If you are not using this functionality, just pass 0. |


| upm_result_t urm37_get_temperature | ( | urm37_context | dev, |
| float * | temperature | ||
| ) |
Get the temperature measurement. This is only valid in UART mode.
| dev | sensor context |
| temperature | A float pointer containing the measured temperature in degrees C |


| upm_result_t urm37_read_eeprom | ( | urm37_context | dev, |
| uint8_t | addr, | ||
| uint8_t * | value | ||
| ) |
In UART mode only, read a value from the EEPROM and return it.
| dev | sensor context |
| addr | The address in the EEPROM to read. Valid values are between 0x00-0x04. |
| value | A pointer containing the returned value. |


| upm_result_t urm37_write_eeprom | ( | urm37_context | dev, |
| uint8_t | addr, | ||
| uint8_t | value | ||
| ) |
In UART mode only, write a value into an address on the EEPROM.
| dev | sensor context |
| addr | The address in the EEPROM to write. Valid values are between 0x00-0x04. |
| value | The value to write |


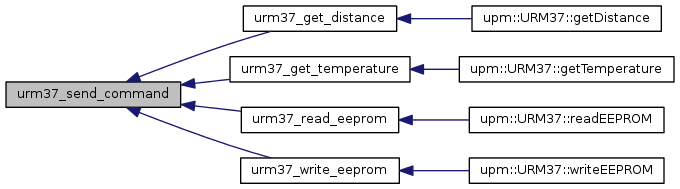
| upm_result_t urm37_send_command | ( | urm37_context | dev, |
| char * | cmd, | ||
| char * | response | ||
| ) |
In UART mode only, send a 4-byte command, and return a 4-byte response.
| dev | sensor context |
| cmd | A 4-byte command to transmit |
| response | The 4-byte response |
| typedef struct _urm37_context * urm37_context |
device context
 1.8.6
1.8.6