|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|

Go to the source code of this file.
Data Structures | |
| struct | _bmg160_context |
Functions | |
| bmg160_context | bmg160_init (int bus, int addr, int cs) |
| void | bmg160_close (bmg160_context dev) |
| upm_result_t | bmg160_update (const bmg160_context dev) |
| uint8_t | bmg160_get_chip_id (const bmg160_context dev) |
| void | bmg160_get_gyroscope (const bmg160_context dev, float *x, float *y, float *z) |
| float | bmg160_get_temperature (const bmg160_context dev) |
| upm_result_t | bmg160_devinit (const bmg160_context dev, BMG160_POWER_MODE_T pwr, BMG160_RANGE_T range, BMG160_BW_T bw) |
| upm_result_t | bmg160_reset (const bmg160_context dev) |
| upm_result_t | bmg160_set_range (const bmg160_context dev, BMG160_RANGE_T range) |
| upm_result_t | bmg160_set_bandwidth (const bmg160_context dev, BMG160_BW_T bw) |
| upm_result_t | bmg160_set_power_mode (const bmg160_context dev, BMG160_POWER_MODE_T power) |
| void | bmg160_enable_fifo (const bmg160_context dev, bool useFIFO) |
| upm_result_t | bmg160_fifo_set_watermark (const bmg160_context dev, int wm) |
| upm_result_t | bmg160_fifo_config (const bmg160_context dev, BMG160_FIFO_MODE_T mode, BMG160_FIFO_DATA_SEL_T axes) |
| uint8_t | bmg160_get_interrupt_enable0 (const bmg160_context dev) |
| upm_result_t | bmg160_set_interrupt_enable0 (const bmg160_context dev, uint8_t bits) |
| uint8_t | bmg160_get_interrupt_map0 (const bmg160_context dev) |
| upm_result_t | bmg160_set_interrupt_map0 (const bmg160_context dev, uint8_t bits) |
| uint8_t | bmg160_get_interrupt_map1 (const bmg160_context dev) |
| upm_result_t | bmg160_set_interrupt_map1 (const bmg160_context dev, uint8_t bits) |
| uint8_t | bmg160_get_interrupt_src (const bmg160_context dev) |
| upm_result_t | bmg160_set_interrupt_src (const bmg160_context dev, uint8_t bits) |
| uint8_t | bmg160_get_interrupt_output_control (const bmg160_context dev) |
| upm_result_t | bmg160_set_interrupt_output_control (const bmg160_context dev, uint8_t bits) |
| upm_result_t | bmg160_clear_interrupt_latches (const bmg160_context dev) |
| BMG160_RST_LATCH_T | bmg160_get_interrupt_latch_behavior (const bmg160_context dev) |
| upm_result_t | bmg160_set_interrupt_latch_behavior (const bmg160_context dev, BMG160_RST_LATCH_T latch) |
| uint8_t | bmg160_get_interrupt_status0 (const bmg160_context dev) |
| uint8_t | bmg160_get_interrupt_status1 (const bmg160_context dev) |
| uint8_t | bmg160_get_interrupt_status2 (const bmg160_context dev) |
| uint8_t | bmg160_get_interrupt_status3 (const bmg160_context dev) |
| upm_result_t | bmg160_enable_register_shadowing (const bmg160_context dev, bool shadow) |
| upm_result_t | bmg160_enable_output_filtering (const bmg160_context dev, bool filter) |
| upm_result_t | bmg160_install_isr (const bmg160_context dev, BMG160_INTERRUPT_PINS_T intr, int gpio, mraa_gpio_edge_t level, void(*isr)(void *), void *arg) |
| void | bmg160_uninstall_isr (const bmg160_context dev, BMG160_INTERRUPT_PINS_T intr) |
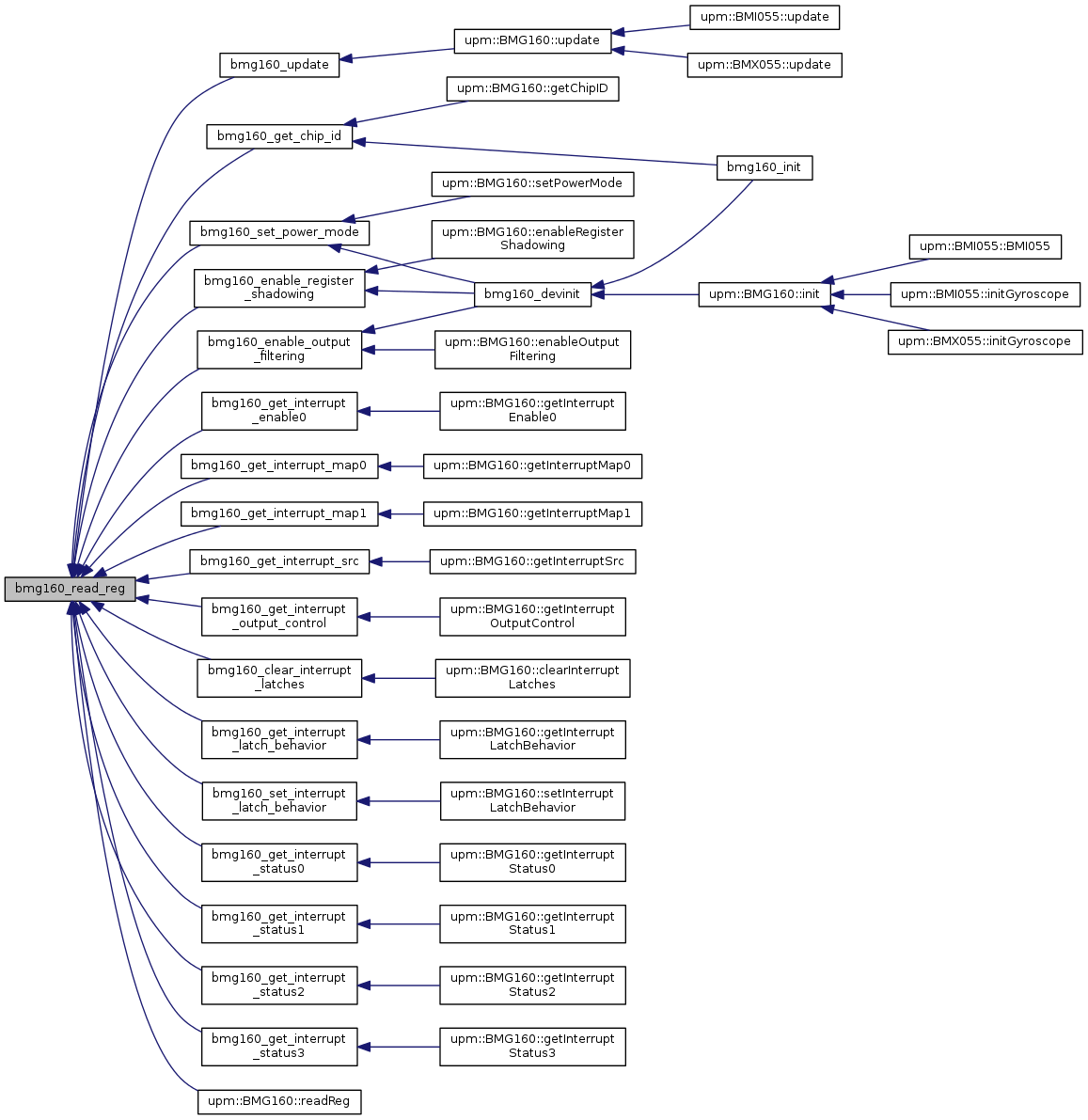
| uint8_t | bmg160_read_reg (const bmg160_context dev, uint8_t reg) |
| int | bmg160_read_regs (const bmg160_context dev, uint8_t reg, uint8_t *buffer, int len) |
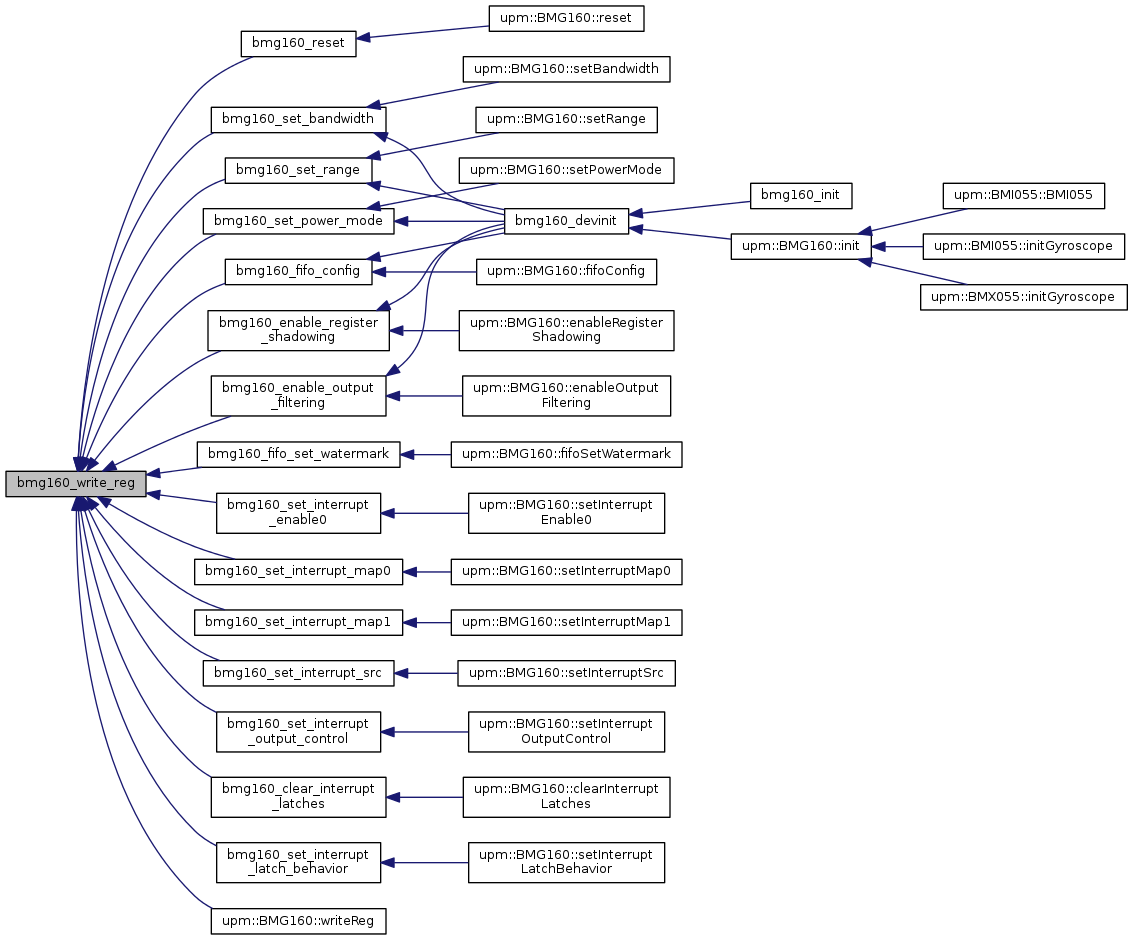
| upm_result_t | bmg160_write_reg (const bmg160_context dev, uint8_t reg, uint8_t val) |
Typedefs | |
| typedef struct _bmg160_context * | bmg160_context |
| bmg160_context bmg160_init | ( | int | bus, |
| int | addr, | ||
| int | cs | ||
| ) |
BMG160 initialization.
This device can support both I2C and SPI. For SPI, set the addr to -1, and specify a positive integer representing the Chip Select (CS) pin for the cs argument. If you are using a hardware CS pin (like Intel Edison with Arduino breakout), then you can connect the proper pin to the hardware CS pin on your MCU and supply -1 for cs.
| bus | I2C or SPI bus to use. |
| addr | The address for this device, or -1 for SPI. |
| cs | The gpio pin to use for the SPI Chip Select. Use -1 for I2C or for SPI with a hardware controlled pin. |
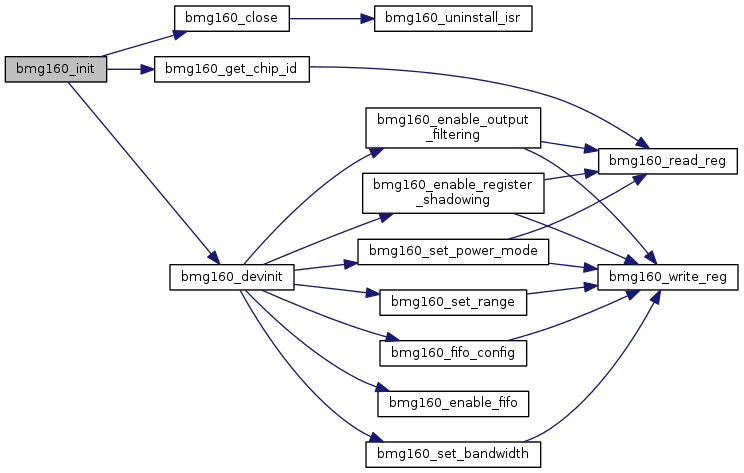
| void bmg160_close | ( | bmg160_context | dev | ) |
BMG160 Destructor.
| dev | The device context. |

| upm_result_t bmg160_update | ( | const bmg160_context | dev | ) |
Update the internal stored values from sensor data.
| dev | The device context. |

| uint8_t bmg160_get_chip_id | ( | const bmg160_context | dev | ) |
Return the chip ID.
| dev | The device context. |

| void bmg160_get_gyroscope | ( | const bmg160_context | dev, |
| float * | x, | ||
| float * | y, | ||
| float * | z | ||
| ) |
Return gyroscope data in degrees per second. bmg160_update() must have been called prior to calling this method.
| dev | The device context. |
| x | Pointer to a floating point value that will have the current x component placed into it. |
| y | Pointer to a floating point value that will have the current y component placed into it. |
| z | Pointer to a floating point value that will have the current z component placed into it. |

| float bmg160_get_temperature | ( | const bmg160_context | dev | ) |
Return the current measured temperature. Note, this is not ambient temperature. bmg160_update() must have been called prior to calling this method.
| dev | The device context. |

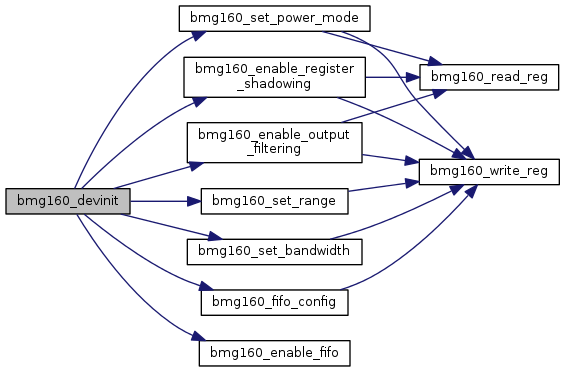
| upm_result_t bmg160_devinit | ( | const bmg160_context | dev, |
| BMG160_POWER_MODE_T | pwr, | ||
| BMG160_RANGE_T | range, | ||
| BMG160_BW_T | bw | ||
| ) |
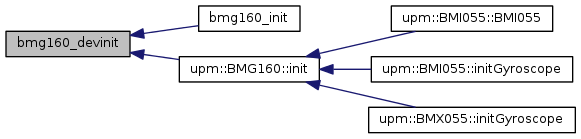
Initialize the device and start operation. This function is called from bmg160_init(), so it will not need to be called by a user unless the device is reset.
In addition, it will enable register shadowing and enable the FIFO in bypass mode.
| dev | The device context. |
| pwr | One of the BMG160_POWER_MODE_T values. |
| range | One of the BMG160_RANGE_T values. |
| bw | One of the filtering BMG160_BW_T values. |
| upm_result_t bmg160_reset | ( | const bmg160_context | dev | ) |
Reset the device as if during a power on reset. All configured values are lost when this happens. You should call bmg160_devinit() afterwards, or at least perform the same initialization bmg160_devinit() does before continuing.
| dev | The device context. |


| upm_result_t bmg160_set_range | ( | const bmg160_context | dev, |
| BMG160_RANGE_T | range | ||
| ) |
Set the gyroscope detection scaling range. This device supports 125, 250, 500, 1000, and 2000 degree/s ranges.
| dev | The device context. |
| range | One of the BMG160_RANGE_T values. |


| upm_result_t bmg160_set_bandwidth | ( | const bmg160_context | dev, |
| BMG160_BW_T | bw | ||
| ) |
Set the output filtering bandwidth of the device.
| dev | The device context. |
| bw | One of the BMG160_BW_T values. |


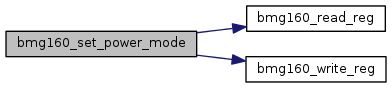
| upm_result_t bmg160_set_power_mode | ( | const bmg160_context | dev, |
| BMG160_POWER_MODE_T | power | ||
| ) |
Set the power mode of the device. Care must be taken when setting a low power or suspend mode. See the datasheet for details. In certain power modes, register write must be drastically slowed down, which we cannot support.
| dev | The device context. |
| power | One of the BMG160_POWER_MODE_T values. |

| void bmg160_enable_fifo | ( | const bmg160_context | dev, |
| bool | useFIFO | ||
| ) |
Enable bmg160_update() to read from the FIFO rather than the gyroscope axis registers directly. bmg160_devinit() enables this mode by default. An advantage to this mode that all axis data is sampled from the same timeslice. When reading directly from the gyroscope output registers, it's possible for one axis to be updated while another is being read, causing a temporal inconsistency.
Using the FIFO removes this problem.
| dev | The device context. |
| useFIFO | true to enable bmg160_update() to read from the FIFO. When false, update will read from the gyroscope output registers directly. |

| upm_result_t bmg160_fifo_set_watermark | ( | const bmg160_context | dev, |
| int | wm | ||
| ) |
Set the FIFO watermark. When the watermark is reached an interrupt (if enabled) will be generated.
| dev | The device context. |
| wm | The FIFO watermark to use. The maximum value is 63. |


| upm_result_t bmg160_fifo_config | ( | const bmg160_context | dev, |
| BMG160_FIFO_MODE_T | mode, | ||
| BMG160_FIFO_DATA_SEL_T | axes | ||
| ) |
Set the FIFO configuration. bmg160_devinit() uses the BMG160_FIFO_MODE_BYPASS mode with axes set to BMG160_FIFO_DATA_SEL_XYZ by default.
| dev | The device context. |
| mode | One of the BMG160_FIFO_MODE_T values. |
| axes | One of the BMG160_FIFO_DATA_SEL_T values. |


| uint8_t bmg160_get_interrupt_enable0 | ( | const bmg160_context | dev | ) |
Return the Interrupt Enables 0 register. These registers allow you to enable various interrupt conditions. See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_set_interrupt_enable0 | ( | const bmg160_context | dev, |
| uint8_t | bits | ||
| ) |
Set the Interrupt Enables 0 register. See the datasheet for details.
| dev | The device context. |
| bits | A bitmask of BMG160_INT_EN_0_BITS_T bits. |


| uint8_t bmg160_get_interrupt_map0 | ( | const bmg160_context | dev | ) |
Return the Interrupt Map 0 register. These registers allow you to map specific interrupts to the interrupt 1 or interrupt 2 pin. See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_set_interrupt_map0 | ( | const bmg160_context | dev, |
| uint8_t | bits | ||
| ) |
Set the Interrupt Map 0 register. These registers allow you to map specific interrupts to the interrupt 1 or interrupt 2 pin. See the datasheet for details.
| dev | The device context. |
| bits | A bitmask of BMG160_INT_MAP_0_BITS_T bits. |


| uint8_t bmg160_get_interrupt_map1 | ( | const bmg160_context | dev | ) |
Return the Interrupt Map 1 register. See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_set_interrupt_map1 | ( | const bmg160_context | dev, |
| uint8_t | bits | ||
| ) |
Set the Interrupt Map 1 register. See the datasheet for details.
| dev | The device context. |
| bits | A bitmask of BMG160_INT_MAP_1_BITS_T bits. |


| uint8_t bmg160_get_interrupt_src | ( | const bmg160_context | dev | ) |
Return the Interrupt source register. This register allows determining where data comes from (filtered/unfiltered) for those interrupt sources where this is selectable. See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_set_interrupt_src | ( | const bmg160_context | dev, |
| uint8_t | bits | ||
| ) |
Set the Interrupt source register. This register allows determining where data comes from (filtered/unfiltered) for those interrupt sources where this is selectable. See the datasheet for details.
| dev | The device context. |
| bits | A bitmask of BMG160_INT_1A_BITS_T bits. |


| uint8_t bmg160_get_interrupt_output_control | ( | const bmg160_context | dev | ) |
Return the Interrupt output control register. This register allows determining the electrical characteristics of the 2 interrupt pins (open-drain/push-pull and level/edge triggering). See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_set_interrupt_output_control | ( | const bmg160_context | dev, |
| uint8_t | bits | ||
| ) |
Set the Interrupt output control register. This register allows determining the electrical characteristics of the 2 interrupt pins (open-drain/push-pull and level/edge triggering). See the datasheet for details.
| dev | The device context. |
| bits | A bitmask of BMG160_INT_EN_1_BITS_T bits. |


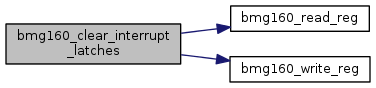
| upm_result_t bmg160_clear_interrupt_latches | ( | const bmg160_context | dev | ) |
Clear all latched interrupts. See the datasheet for details.
| dev | The device context. |

| BMG160_RST_LATCH_T bmg160_get_interrupt_latch_behavior | ( | const bmg160_context | dev | ) |
Return the current interrupt latching behavior. See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_set_interrupt_latch_behavior | ( | const bmg160_context | dev, |
| BMG160_RST_LATCH_T | latch | ||
| ) |
Set the current interrupt latching behavior. See the datasheet for details.
| dev | The device context. |
| latch | One of the BMG160_RST_LATCH_T values. |

| uint8_t bmg160_get_interrupt_status0 | ( | const bmg160_context | dev | ) |
Return the interrupt status 0 register. These registers indicate which interrupts have been triggered. See the datasheet for details.
| dev | The device context. |


| uint8_t bmg160_get_interrupt_status1 | ( | const bmg160_context | dev | ) |
Return the interrupt status 1 register. See the datasheet for details.
| dev | The device context. |


| uint8_t bmg160_get_interrupt_status2 | ( | const bmg160_context | dev | ) |
Return the interrupt status 2 register. See the datasheet for details.
| dev | The device context. |


| uint8_t bmg160_get_interrupt_status3 | ( | const bmg160_context | dev | ) |
Return the interrupt status 3 register. See the datasheet for details.
| dev | The device context. |


| upm_result_t bmg160_enable_register_shadowing | ( | const bmg160_context | dev, |
| bool | shadow | ||
| ) |
Enable shadowing of the gyroscope output registers. When enabled, a read of an axis LSB register automatically locks the MSB register of that axis until it has been read. This is usually a good thing to have enabled. bmg160_devinit() enables this by default. If disabled, then it becomes possible for part of an axis value to change while another part is being read, causing inconsistent data.
| dev | The device context. |
| shadow | true to enable axis register shadowing, false otherwise. |

| upm_result_t bmg160_enable_output_filtering | ( | const bmg160_context | dev, |
| bool | filter | ||
| ) |
Enable filtering of the gyroscope axis data. bmg160_devinit() enables this by default. If disabled, then gyroscope data that is read will be raw and unfiltered (rated R). See the datasheet for details.
| dev | The device context. |
| filter | true to enable filtering, false to disable. |

| upm_result_t bmg160_install_isr | ( | const bmg160_context | dev, |
| BMG160_INTERRUPT_PINS_T | intr, | ||
| int | gpio, | ||
| mraa_gpio_edge_t | level, | ||
| void(*)(void *) | isr, | ||
| void * | arg | ||
| ) |
install an interrupt handler.
| dev | The device context. |
| intr | One of the BMG160_INTERRUPT_PINS_T values specifying which interrupt pin you are installing. |
| gpio | GPIO pin to use as interrupt pin |
| level | The interrupt trigger level (one of mraa_gpio_edge_t values). Make sure that you have configured the interrupt pin properly for whatever level you choose. |
| isr | The interrupt handler, accepting a void * argument |
| arg | The argument to pass the the interrupt handler |


| void bmg160_uninstall_isr | ( | const bmg160_context | dev, |
| BMG160_INTERRUPT_PINS_T | intr | ||
| ) |
uninstall a previously installed interrupt handler
| dev | The device context. |
| intr | One of the BMG160_INTERRUPT_PINS_T values specifying which interrupt pin you are removing. |
| uint8_t bmg160_read_reg | ( | const bmg160_context | dev, |
| uint8_t | reg | ||
| ) |
Read a register.
| dev | The device context. |
| reg | The register to read. |
| int bmg160_read_regs | ( | const bmg160_context | dev, |
| uint8_t | reg, | ||
| uint8_t * | buffer, | ||
| int | len | ||
| ) |
Read contiguous registers into a buffer.
| dev | The device context. |
| buffer | The buffer to store the results. |
| len | The number of registers to read. |

| upm_result_t bmg160_write_reg | ( | const bmg160_context | dev, |
| uint8_t | reg, | ||
| uint8_t | val | ||
| ) |
Write to a register.
| dev | The device context. |
| reg | The register to write to. |
| val | The value to write. |
| typedef struct _bmg160_context * bmg160_context |
Device context
 1.8.11
1.8.11

