|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
Public Member Functions | |
| BH1749 (int bus=0, int addr=0x39) | |
| Initialize a sensor instance with bus and address. More... | |
| virtual | ~BH1749 () |
| Close and free sensor. | |
| void | Enable () |
| Enables RGB color measurement on the sensor. More... | |
| void | Disable () |
| Disables RGB color measurement on the sensor. More... | |
| void | CheckWhoAmI () |
| Check "who am I" register value to identify the sensor. More... | |
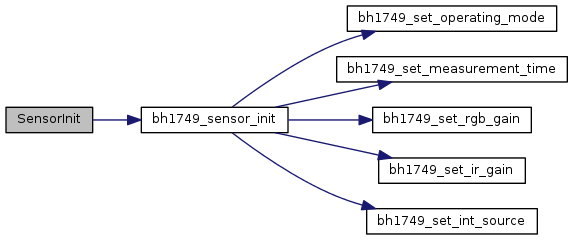
| void | SensorInit (OPERATING_MODES opMode, MEAS_TIMES measTime, RGB_GAINS rgbGain, IR_GAINS irGain, INT_SOURCES intSource) |
| Initializes (writes) configuration values to sensor. More... | |
| void | SetOperatingMode (OPERATING_MODES opMode) |
| Sets operating mode (interrupt persistance) More... | |
| int | GetOperatingMode () |
| Gets operating mode (interrupt persistance) value. More... | |
| void | SetMeasurementTime (MEAS_TIMES measTime) |
| Sets measurement time (ODR) More... | |
| int | GetMeasurementTime () |
| Gets measurement time (ODR) value. More... | |
| void | SetRgbGain (RGB_GAINS rgbGain) |
| Sets RGB gain value. More... | |
| int | GetRgbGain () |
| Gets RGB gain value. More... | |
| void | SetIrGain (IR_GAINS irGain) |
| Sets IR gain value. More... | |
| int | GetIrGain () |
| Gets IR gain value. More... | |
| void | SetIntSource (INT_SOURCES intSource) |
| Sets interrupt source value. More... | |
| char | GetInterruptSourceChar () |
| Gets interrupt source value. More... | |
| void | EnableInterrupt () |
| Enables interrupt mode. More... | |
| void | DisableInterrupt () |
| Disables interrupt mode. More... | |
| void | ResetInterrupt () |
| Resets interrupt status (clear) to allow new interrupt reads. More... | |
| bool | IsInterrupted () |
| Gets interrupt status, whether interrupt is raised or not. More... | |
| bool | IsInterruptEnabled () |
| Gets interrupt mode status. More... | |
| void | SoftReset () |
| Initiates a software reset to the sensor. All register values will be written to their defaults, thus sensor_init() must be called after this, and thresholds also needs to be set. More... | |
| void | SetThresholdHigh (uint16_t threshold) |
| Sets threshold high value. More... | |
| int | GetThresholdHigh () |
| Gets threshold high value. More... | |
| void | SetThresholdLow (uint16_t threshold) |
| Sets threshold low value. More... | |
| int | GetThresholdLow () |
| Gets threshold low value. More... | |
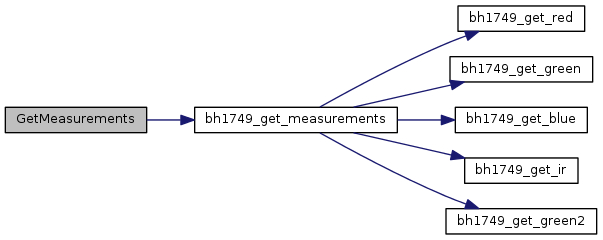
| uint16_t | GetRed () |
| Gets value of Red color channel. More... | |
| uint16_t | GetGreen () |
| Gets value of Green color channel. More... | |
| uint16_t | GetBlue () |
| Gets value of Blue color channel. More... | |
| uint16_t | GetIr () |
| Gets value of IR color channel. More... | |
| uint16_t | GetGeen2 () |
| Gets value of Green2 color channel. More... | |
| std::vector< uint16_t > | GetMeasurements () |
| Gets all channels measurements values. More... | |
| void | InstallISR (mraa_gpio_edge_t edge, int pin, void(*isr)(void *), void *isr_args) |
| Installs the ISR to a given GPIO pin. More... | |
| void | RemoveISR () |
| Removes the ISR if it is installed. | |
| std::string | RegistersDump () |
| Gets a dump of configuration registers as a string. More... | |
| BH1749 | ( | int | bus = 0, |
| int | addr = 0x39 |
||
| ) |
This calls SensorInit() to set default values for operating mode, gains, measurement time, interrupt source and then sets threshold high to 511.
| bus | I2C bus number |
| addr | I2C sensor address |
| std::runtime_error | on initialization failure |
| void Enable | ( | ) |
| void Disable | ( | ) |
| void CheckWhoAmI | ( | ) |
| std::runtime_error | if this value is incorrect |

| void SensorInit | ( | OPERATING_MODES | opMode, |
| MEAS_TIMES | measTime, | ||
| RGB_GAINS | rgbGain, | ||
| IR_GAINS | irGain, | ||
| INT_SOURCES | intSource | ||
| ) |
| opMode | Operating mode choice, a value of OPERATING_MODES enum |
| measTime | Measurement time choice, a value of MEAS_TIMES enum |
| rgbGain | RGB gain choice, a value of RGB_GAINS enum |
| irGain | IR gain choice, a value of IR_GAINS enum |
| intSource | interrupt source choice, a value of INT_SOURCES enum |
| std::runtime_error | if one of values setting fails |
| void SetOperatingMode | ( | OPERATING_MODES | opMode | ) |
| opMode | Operating mode choice, a value of OPERATING_MODES enum |
| std::runtime_error | if writing value fails |

| int GetOperatingMode | ( | ) |
| opMode | pointer (uint8_t) to save value |
| std::runtime_error | if reading the value fails |

| void SetMeasurementTime | ( | MEAS_TIMES | measTime | ) |
| measTime | measurement time choice, a value of MEAS_TIMES enum |
| std::runtime_error | if writing value fails |

| int GetMeasurementTime | ( | ) |
| std::runtime_error | if reading the value fails |

| void SetRgbGain | ( | RGB_GAINS | rgbGain | ) |
| rgbGain | RGB gain choice, a value of RGB_GAINS enum |
| std::runtime_error | if writing value fails |

| int GetRgbGain | ( | ) |
| std::runtime_error | if reading the value fails |

| void SetIrGain | ( | IR_GAINS | irGain | ) |
| irGain | IR gain choice, a value of IR_GAINS enum |
| std::runtime_error | if writing value fails |

| int GetIrGain | ( | ) |
| std::runtime_error | if reading the value fails |

| void SetIntSource | ( | INT_SOURCES | intSource | ) |
| intSource | interrupt source choice, a value of INT_SOURCES enum |
| std::runtime_error | if writing value fails |

| char GetInterruptSourceChar | ( | ) |
| std::runtime_error | if reading the value fails |

| void EnableInterrupt | ( | ) |
| std::runtime_error | if writing enable bit fails |

| void DisableInterrupt | ( | ) |
| std::runtime_error | if writing disable bit fails |

| void ResetInterrupt | ( | ) |
| std::runtime_error | if writing reset bit fails |

| bool IsInterrupted | ( | ) |

| bool IsInterruptEnabled | ( | ) |

| void SoftReset | ( | ) |
| std::runtime_error | if writing reset bit fails |

| void SetThresholdHigh | ( | uint16_t | threshold | ) |
| threshold | interrupt threshold high value, range 0-65536 |
| std::runtime_error | if writing value fails |

| int GetThresholdHigh | ( | ) |
| std::runtime_error | if reading the value fails |

| void SetThresholdLow | ( | uint16_t | threshold | ) |
| threshold | interrupt threshold low value, range 0-65536 |
| std::runtime_error | if writing value fails |

| int GetThresholdLow | ( | ) |
| std::runtime_error | if reading the value fails |

| uint16_t GetRed | ( | ) |
| std::runtime_error | if reading the value fails |

| uint16_t GetGreen | ( | ) |
| std::runtime_error | if reading the value fails |

| uint16_t GetBlue | ( | ) |
| std::runtime_error | if reading the value fails |

| uint16_t GetIr | ( | ) |
| std::runtime_error | if reading the value fails |

| uint16_t GetGeen2 | ( | ) |
| std::runtime_error | if reading the value fails |

| std::vector< uint16_t > GetMeasurements | ( | ) |
| std::runtime_error | if reading one of the values fails |
| void InstallISR | ( | mraa_gpio_edge_t | edge, |
| int | pin, | ||
| void(*)(void *) | isr, | ||
| void * | isr_args | ||
| ) |
| edge | Edge type to raise ISR with, of type mraa_gpio_edge_t |
| pin | GPIO pin number |
| isr | Pointer to ISR function |
| isr_args | Arguments to pass the ISR function |
| std::runtime_error | if installing ISR fails |

| std::string RegistersDump | ( | ) |
| std::runtime_error | if reading one of the registers fails |

 1.8.11
1.8.11



