|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
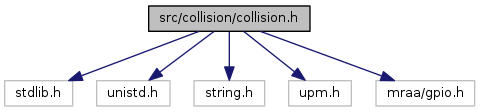
Go to the source code of this file.
Data Structures | |
| struct | _collision_context |
Functions | |
| collision_context | collision_init (int pin) |
| void | collision_close (collision_context dev) |
| upm_result_t | collision_is_colliding (collision_context dev, bool *collision_val) |
Typedefs | |
| typedef struct _collision_context * | collision_context |
| collision_context collision_init | ( | int | pin | ) |
Collision Initialization function
| pin | number |
| void collision_close | ( | collision_context | dev | ) |
Collision Initialization function
| void* | pointer to the sensor struct |
| upm_result_t collision_is_colliding | ( | collision_context | dev, |
| bool * | collision_val | ||
| ) |
This function tells you whether the sensor has collided with something or not.
| void* | pointer to the sensor struct |
| bool* | pointer to hold the collision value |
| typedef struct _collision_context * collision_context |
device context
 1.8.11
1.8.11

