|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
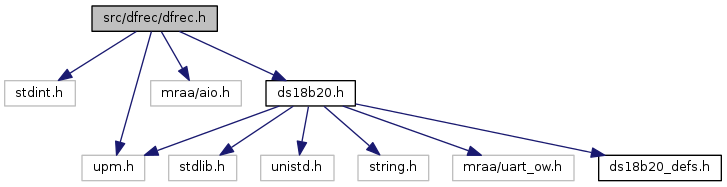
Go to the source code of this file.
Data Structures | |
| struct | _dfrec_context |
Functions | |
| dfrec_context | dfrec_init (unsigned int apin, unsigned int uart_ow, unsigned int device_idx, float a_ref) |
| void | dfrec_close (dfrec_context dev) |
| upm_result_t | dfrec_update (const dfrec_context dev) |
| void | dfrec_set_offset (const dfrec_context dev, float offset) |
| void | dfrec_set_scale (const dfrec_context dev, float scale) |
| float | dfrec_get_ec (const dfrec_context dev) |
| float | dfrec_get_volts (const dfrec_context dev) |
| float | dfrec_get_temperature (const dfrec_context dev) |
| float | dfrec_get_normalized (const dfrec_context dev) |
| void | dfrec_set_threshold_min_max (const dfrec_context dev, float min, float max) |
| void | dfrec_set_threshold_1 (const dfrec_context dev, float thres, float scale, float offset) |
| void | dfrec_set_threshold_2 (const dfrec_context dev, float thres, float scale, float offset) |
| void | dfrec_set_threshold_3 (const dfrec_context dev, float scale, float offset) |
Typedefs | |
| typedef struct _dfrec_context * | dfrec_context |
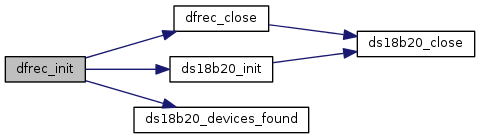
| dfrec_context dfrec_init | ( | unsigned int | apin, |
| unsigned int | uart_ow, | ||
| unsigned int | device_idx, | ||
| float | a_ref | ||
| ) |
DFREC Initializer
| apin | Analog pin to use. |
| uart_ow | The UART that the ds10b20 temperature sensor is connected to. |
| device_idx | The device index of the ds18b20 sensor to use. If you only have 1 ds18b20 sensor on your DS one wire bus, you would pass 0 here. |
| a_ref | The analog reference voltage in use |
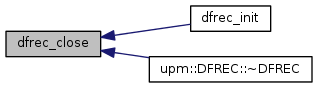
| void dfrec_close | ( | dfrec_context | dev | ) |
DFREC sensor close function

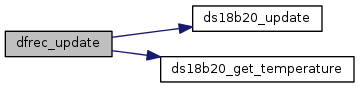
| upm_result_t dfrec_update | ( | const dfrec_context | dev | ) |
Read the sensor status and update internal state. dfrec_update() must have been called before calling any of the other dfrec_get*() functions
| dev | sensor context |

| void dfrec_set_offset | ( | const dfrec_context | dev, |
| float | offset | ||
| ) |
Set sensor offset. This offset is applied to the EC value before scaling. Default is 0.0.
| dev | sensor context pointer |
| offset | Offset to apply to the computed EC value |

| void dfrec_set_scale | ( | const dfrec_context | dev, |
| float | scale | ||
| ) |
Set sensor scale. The EC return value is scaled by this value before the offset is applied. Default is 1.0.
| dev | sensor context pointer |
| scale | The scale to apply to the computed EC value |

| float dfrec_get_ec | ( | const dfrec_context | dev | ) |
Get computed EC (in ms/cm) value from the sensor. dfrec_update() must have been called prior to calling this function.
| dev | sensor context pointer |

| float dfrec_get_volts | ( | const dfrec_context | dev | ) |
Get the raw measured volts from the sensor. dfrec_update() must have been called prior to calling this function.
| dev | sensor context pointer |

| float dfrec_get_temperature | ( | const dfrec_context | dev | ) |
Get the measured temperature from the temperature sensor. The return value will be in Celsius.
| dev | sensor context pointer |

| float dfrec_get_normalized | ( | const dfrec_context | dev | ) |
Get the raw normalized ADC values from the sensor. dfrec_update() must have been called prior to calling this function.
| dev | sensor context pointer |

| void dfrec_set_threshold_min_max | ( | const dfrec_context | dev, |
| float | min, | ||
| float | max | ||
| ) |
Set the global threshold min and max values. See the DFRobot wiki for details.
| dev | sensor context pointer |
| min | Minimum threshold to be valid. Default 150. |
| max | Maximum threshold to be valid. Default 3300. |

| void dfrec_set_threshold_1 | ( | const dfrec_context | dev, |
| float | thres, | ||
| float | scale, | ||
| float | offset | ||
| ) |
Set the threshold 1 values. See the DFRobot wiki for details.
| dev | sensor context pointer |
| thres | Threshold maximum for value section 1. Default 448. |
| scale | Scale for value section 1. Default 6.64. |
| offset | Offset for value section 1. Default -64.32. |

| void dfrec_set_threshold_2 | ( | const dfrec_context | dev, |
| float | thres, | ||
| float | scale, | ||
| float | offset | ||
| ) |
Set the threshold 2 values. See the DFRobot wiki for details.
| dev | sensor context pointer |
| thres | Threshold maximum for value section 2. Default 1457. |
| scale | Scale for value section 2. Default 6.98. |
| offset | Offset for value section 2. Default -127.0. |

| void dfrec_set_threshold_3 | ( | const dfrec_context | dev, |
| float | scale, | ||
| float | offset | ||
| ) |
Set the threshold 3 values. See the DFRobot wiki for details.
| dev | sensor context pointer |
| scale | Scale for value section 3. Default 5.3. |
| offset | Offset for value section 3. Default 2278. |

| typedef struct _dfrec_context * dfrec_context |
Device context
 1.8.11
1.8.11

