|
upm
0.4.0
Sensor/Actuator repository for libmraa (v0.8.0)
|
|
upm
0.4.0
Sensor/Actuator repository for libmraa (v0.8.0)
|
API for the LSM9DS0 3-axis Gyroscope, Accelerometer, and Magnetometer. More...
The LSM9DS0 is a system-in-package featuring a 3D digital linear acceleration sensor, a 3D digital angular rate sensor, and a 3D digital magnetic sensor.
The LSM9DS0 has a linear acceleration full scale of 2g/4g/6g/8g/16g, a magnetic field full scale of 2/4/8/12 gauss and an angular rate of 245/500/2000 dps.
While not all of the functionality of this device is supported initially, methods and register definitions are provided that should allow an end user to implement whatever features are required.
This driver was developed on a Sparkfun 9DOF edison block.
Public Types | |
| enum | REG_G_T { REG_WHO_AM_I_G = 0x0f, REG_CTRL_REG1_G = 0x20, REG_CTRL_REG2_G = 0x21, REG_CTRL_REG3_G = 0x22, REG_CTRL_REG4_G = 0x23, REG_CTRL_REG5_G = 0x24, REG_REFERENCE_G = 0x25, REG_STATUS_REG_G = 0x27, REG_OUT_X_L_G = 0x28, REG_OUT_X_H_G = 0x29, REG_OUT_Y_L_G = 0x2a, REG_OUT_Y_H_G = 0x2b, REG_OUT_Z_L_G = 0x2c, REG_OUT_Z_H_G = 0x2d, REG_FIFO_CTRL_REG_G = 0x2e, REG_FIFO_SRC_REG_G = 0x2f, REG_INT1_CFG_G = 0x30, REG_INT1_SRC_G = 0x31, REG_INT1_TSH_XH_G = 0x32, REG_INT1_TSH_XL_G = 0x33, REG_INT1_TSH_YH_G = 0x34, REG_INT1_TSH_YL_G = 0x35, REG_INT1_TSH_ZH_G = 0x36, REG_INT1_TSH_ZL_G = 0x37, REG_INT1_DURATION_G = 0x38 } |
| enum | CTRL_REG1_G_BITS_T { CTRL_REG1_G_YEN = 0x01, CTRL_REG1_G_XEN = 0x02, CTRL_REG1_G_ZEN = 0x04, CTRL_REG1_G_PD = 0x08, CTRL_REG1_G_BW0 = 0x10, CTRL_REG1_G_BW1 = 0x20, _CTRL_REG1_G_BW_MASK = 3, _CTRL_REG1_G_BW_SHIFT = 4, CTRL_REG1_G_DR0 = 0x40, CTRL_REG1_G_DR1 = 0x80, _CTRL_REG1_G_DR_MASK = 3, _CTRL_REG1_G_DR_SHIFT = 6, CTRL_REG1_G_ODR0 = 0x10, CTRL_REG1_G_ODR1 = 0x20, CTRL_REG1_G_ODR2 = 0x40, CTRL_REG1_G_ODR3 = 0x80, _CTRL_REG1_G_ODR_MASK = 15, _CTRL_REG1_G_ODR_SHIFT = 4 } |
| enum | G_ODR_T { G_ODR_95_12_5 = 0, G_ODR_95_25 = 1, G_ODR_190_12_5 = 4, G_ODR_190_25 = 5, G_ODR_190_50 = 6, G_ODR_190_70 = 7, G_ODR_380_20 = 8, G_ODR_380_25 = 9, G_ODR_380_50 = 10, G_ODR_380_100 = 11, G_ODR_760_30 = 12, G_ODR_760_35 = 13, G_ODR_760_50 = 14, G_ODR_760_100 = 15 } |
| enum | CTRL_REG2_G_BITS_T { CTRL_REG2_G_HPCF0 = 0x01, CTRL_REG2_G_HPCF1 = 0x02, CTRL_REG2_G_HPCF2 = 0x04, CTRL_REG2_G_HPCF3 = 0x08, _CTRL_REG2_G_HPCF_MASK = 15, _CTRL_REG2_G_HPCF_SHIFT = 0, CTRL_REG2_G_HPM0 = 0x10, CTRL_REG2_G_HPM1 = 0x20, _CTRL_REG2_G_HPM_MASK = 3, _CTRL_REG2_G_HPM_SHIFT = 4 } |
| enum | G_HPCF_T { G_HPCF_7_2 = 0, G_HPCF_3_5 = 1, G_HPCF_1_8 = 2, G_HPCF_0_9 = 3, G_HPCF_0_45 = 4, G_HPCF_0_18 = 5, G_HPCF_0_09 = 6, G_HPCF_0_045 = 7, G_HPCF_0_018 = 8, G_HPCF_0_009 = 9 } |
| enum | G_HPM_T { G_HPM_NORMAL_RESET_HPF = 0, G_HPM_REFERENCE = 1, G_HPM_NORMAL = 2, G_HPM_AUTORESET_ON_INTR = 3 } |
| enum | CTRL_REG3_G_BITS_T { CTRL_REG3_G_I2_EMPTY = 0x01, CTRL_REG3_G_I2_ORUN = 0x02, CTRL_REG3_G_I2_WTM = 0x04, CTRL_REG3_G_I2_DRDY = 0x08, CTRL_REG3_G_PP_OD = 0x10, CTRL_REG3_G_H_LACTIVE = 0x20, CTRL_REG3_G_I1_BOOT = 0x40, CTRL_REG3_G_I1_INT1 = 0x80 } |
| enum | CTRL_REG4_G_BITS_T { CTRL_REG4_G_SIM = 0x01, CTRL_REG4_G_ST0 = 0x02, CTRL_REG4_G_ST1 = 0x04, _CTRL_REG4_G_ST_MASK = 3, _CTRL_REG4_G_ST_SHIFT = 1, CTRL_REG4_G_FS0 = 0x10, CTRL_REG4_G_FS1 = 0x20, _CTRL_REG4_G_FS_MASK = 3, _CTRL_REG4_G_FS_SHIFT = 4, CTRL_REG4_G_BLE = 0x40, CTRL_REG4_G_BDU = 0x80 } |
| enum | G_ST_T { G_ST_NORMAL = 0, G_ST_SELFTEST0 = 1, G_ST_SELFTEST1 = 3 } |
| enum | G_FS_T { G_FS_245 = 0, G_FS_500 = 1, G_FS_2000 = 2 } |
| enum | CTRL_REG5_G_BITS_T { CTRL_REG5_G_OUTSEL0 = 0x01, CTRL_REG5_G_OUTSEL1 = 0x02, _CTRL_REG5_G_OUTSEL_MASK = 3, _CTRL_REG5_G_OUTSEL_SHIFT = 0, CTRL_REG5_G_INT1SEL0 = 0x04, CTRL_REG5_G_INT1SEL1 = 0x08, _CTRL_REG5_G_INT1SEL_MASK = 3, _CTRL_REG5_G_INT1SEL_SHIFT = 2, CTRL_REG5_G_HPEN = 0x10, CTRL_REG5_G_FIFO_EN = 0x40, CTRL_REG5_G_BOOT = 0x80 } |
| enum | G_INT1OUTSEL_T { G_INT1OUTSEL_0 = 0, G_INT1OUTSEL_1 = 1, G_INT1OUTSEL_2 = 2, G_INT1OUTSEL_3 = 3 } |
| enum | STATUS_REG_G_BITS_T { STATUS_REG_G_XDA = 0x01, STATUS_REG_G_YDA = 0x02, STATUS_REG_G_ZDA = 0x04, STATUS_REG_G_ZYXDA = 0x08, STATUS_REG_G_XOR = 0x10, STATUS_REG_G_YOR = 0x20, STATUS_REG_G_ZOR = 0x40, STATUS_REG_G_ZYXOR = 0x80 } |
| enum | FIFO_CTRL_REG_G_T { FIFO_CTRL_REG_G_WTM0 = 0x01, FIFO_CTRL_REG_G_WTM1 = 0x02, FIFO_CTRL_REG_G_WTM2 = 0x04, FIFO_CTRL_REG_G_WTM3 = 0x08, FIFO_CTRL_REG_G_WTM4 = 0x10, _FIFO_CTRL_REG_G_WTM_MASK = 31, _FIFO_CTRL_REG_G_WTM_SHIFT = 0, FIFO_CTRL_REG_G_FM0 = 0x20, FIFO_CTRL_REG_G_FM1 = 0x40, FIFO_CTRL_REG_G_FM2 = 0x80, _FIFO_CTRL_REG_G_FM_MASK = 7, _FIFO_CTRL_REG_G_FM_SHIFT = 5 } |
| enum | G_FM_T { G_FM_BYPASS = 0, G_FM_FIFO = 1, G_FM_STREAM = 2, G_FM_STREAM2FIFO = 3, G_FM_BYPASS2STREAM = 4 } |
| enum | FIFO_SRC_REG_G_BITS_T { FIFO_CTRL_REG_G_FSS0 = 0x01, FIFO_CTRL_REG_G_FSS1 = 0x02, FIFO_CTRL_REG_G_FSS2 = 0x04, FIFO_CTRL_REG_G_FSS3 = 0x08, FIFO_CTRL_REG_G_FSS4 = 0x10, _FIFO_CTRL_REG_G_FSS_MASK = 31, _FIFO_CTRL_REG_G_FSS_SHIFT = 0, FIFO_CTRL_REG_G_EMPTY = 0x20, FIFO_CTRL_REG_G_OVRN = 0x40, FIFO_CTRL_REG_G_WTM = 0x80 } |
| enum | INT1_CFG_G_BITS_T { INT1_CFG_G_XLIE = 0x01, INT1_CFG_G_XHIE = 0x02, INT1_CFG_G_YLIE = 0x04, INT1_CFG_G_YHIE = 0x08, INT1_CFG_G_ZLIE = 0x10, INT1_CFG_G_ZHIE = 0x20, INT1_CFG_G_LIR = 0x40, INT1_CFG_G_ANDOR = 0x80 } |
| enum | INT1_SRC_G_BITS_T { INT1_SRC_G_XL = 0x01, INT1_SRC_G_XH = 0x02, INT1_SRC_G_YL = 0x04, INT1_SRC_G_YH = 0x08, INT1_SRC_G_ZL = 0x10, INT1_SRC_G_ZH = 0x20, INT1_SRC_G_IA = 0x40 } |
| enum | REG_XM_T { REG_OUT_TEMP_L_XM = 0x05, REG_OUT_TEMP_H_XM = 0x06, REG_STATUS_REG_M = 0x07, REG_OUT_X_L_M = 0x08, REG_OUT_X_H_M = 0x09, REG_OUT_Y_L_M = 0x0a, REG_OUT_Y_H_M = 0x0b, REG_OUT_Z_L_M = 0x0c, REG_OUT_Z_H_M = 0x0d, REG_WHO_AM_I_XM = 0x0f, REG_INT_CTRL_REG_M = 0x12, REG_INT_SRC_REG_M = 0x13, REG_INT_THS_L_M = 0x14, REG_INT_THS_H_M = 0x15, REG_OFFSET_X_L_M = 0x16, REG_OFFSET_X_H_M = 0x17, REG_OFFSET_Y_L_M = 0x18, REG_OFFSET_Y_H_M = 0x19, REG_OFFSET_Z_L_M = 0x1a, REG_OFFSET_Z_H_M = 0x1b, REG_REFERENCE_X = 0x1c, REG_REFERENCE_Y = 0x1d, REG_REFERENCE_Z = 0x1e, REG_CTRL_REG0_XM = 0x1f, REG_CTRL_REG1_XM = 0x20, REG_CTRL_REG2_XM = 0x21, REG_CTRL_REG3_XM = 0x22, REG_CTRL_REG4_XM = 0x23, REG_CTRL_REG5_XM = 0x24, REG_CTRL_REG6_XM = 0x25, REG_CTRL_REG7_XM = 0x26, REG_STATUS_REG_A = 0x27, REG_OUT_X_L_A = 0x28, REG_OUT_X_H_A = 0x29, REG_OUT_Y_L_A = 0x2a, REG_OUT_Y_H_A = 0x2b, REG_OUT_Z_L_A = 0x2c, REG_OUT_Z_H_A = 0x2d, REG_FIFO_CTRL_REG = 0x2e, REG_FIFO_SRC_REG = 0x2f, REG_INT_GEN_1_REG = 0x30, REG_INT_GEN_1_SRC = 0x31, REG_INT_GEN_1_THS = 0x32, REG_INT_GEN_1_DURATION = 0x33, REG_INT_GEN_2_REG = 0x34, REG_INT_GEN_2_SRC = 0x35, REG_INT_GEN_2_THS = 0x36, REG_INT_GEN_2_DURATION = 0x37, REG_CLICK_CFG = 0x38, REG_CLICK_SRC = 0x39, REG_CLICK_THS = 0x3a, REG_TIME_LIMIT = 0x3b, REG_TIME_LATENCY = 0x3c, REG_TIME_WINDOW = 0x3d, REG_ACT_THS = 0x3e, REG_ACT_DUR = 0x3f } |
| enum | STATUS_REG_M_BITS_T { STATUS_REG_M_XMDA = 0x01, STATUS_REG_M_YMDA = 0x02, STATUS_REG_M_ZMDA = 0x04, STATUS_REG_M_ZYXMDA = 0x08, STATUS_REG_M_XMOR = 0x10, STATUS_REG_M_YMOR = 0x20, STATUS_REG_M_ZMOR = 0x40, STATUS_REG_M_ZYXMOR = 0x80 } |
| enum | INT_CTRL_REG_M_BITS_T { INT_CTRL_REG_M_MIEN = 0x01, INT_CTRL_REG_M_4D = 0x02, INT_CTRL_REG_M_IEL = 0x04, INT_CTRL_REG_M_IEA = 0x08, INT_CTRL_REG_M_PP_OD = 0x10, INT_CTRL_REG_M_ZMIEN = 0x20, INT_CTRL_REG_M_YMIEN = 0x40, INT_CTRL_REG_M_XMIEN = 0x80 } |
| enum | INT_SRC_REG_M_BITS_T { INT_SRC_REG_M_MINT = 0x01, INT_SRC_REG_M_MROI = 0x02, INT_SRC_REG_M_NTH_Z = 0x04, INT_SRC_REG_M_NTH_Y = 0x08, INT_SRC_REG_M_NTH_X = 0x10, INT_SRC_REG_M_PTH_Z = 0x20, INT_SRC_REG_M_PTH_Y = 0x40, INT_SRC_REG_M_PTH_X = 0x80 } |
| enum | CTRL_REG0_XM_BITS_T { CTRL_REG0_XM_HPIS2 = 0x01, CTRL_REG0_XM_HPIS1 = 0x02, CTRL_REG0_XM_HP_CLICK = 0x04, CTRL_REG0_XM_WTM_LEN = 0x20, CTRL_REG0_XM_FIFO_EN = 0x40, CTRL_REG0_XM_BOOT = 0x80 } |
| enum | CTRL_REG1_XM_BITS_T { CTRL_REG1_XM_AXEN = 0x01, CTRL_REG1_XM_AYEN = 0x02, CTRL_REG1_XM_AZEN = 0x03, CTRL_REG1_XM_BDU = 0x04, CTRL_REG1_XM_AODR0 = 0x10, CTRL_REG1_XM_AODR1 = 0x20, CTRL_REG1_XM_AODR2 = 0x40, CTRL_REG1_XM_AODR3 = 0x80, _CTRL_REG1_XM_AODR_MASK = 15, _CTRL_REG1_XM_AODR_SHIFT = 4 } |
| enum | XM_AODR_T { XM_AODR_PWRDWN = 0, XM_AODR_3_125 = 1, XM_AODR_6_25 = 2, XM_AODR_12_5 = 3, XM_AODR_25 = 4, XM_AODR_50 = 5, XM_AODR_100 = 6, XM_AODR_200 = 7, XM_AODR_400 = 8, XM_AODR_800 = 9, XM_AODR_1000 = 10 } |
| enum | CTRL_REG2_XM_BITS_T { CTRL_REG2_XM_SIM = 0x01, CTRL_REG2_XM_AST0 = 0x02, CTRL_REG2_XM_AST1 = 0x04, _CTRL_REG2_XM_AST_MASK = 3, _CTRL_REG2_XM_AST_SHIFT = 1, CTRL_REG2_XM_AFS0 = 0x08, CTRL_REG2_XM_AFS1 = 0x10, CTRL_REG2_XM_AFS2 = 0x20, _CTRL_REG2_XM_AFS_MASK = 7, _CTRL_REG2_XM_AFS_SHIFT = 3, CTRL_REG2_XM_ABW0 = 0x40, CTRL_REG2_XM_ABW1 = 0x80, _CTRL_REG2_XM_ABW_MASK = 3, _CTRL_REG2_XM_ABW_SHIFT = 6 } |
| enum | XM_AST_T { XM_AST_NORMAL = 0, XM_AST_POS_SIGN = 1, XM_AST_NEG_SIGN = 2 } |
| enum | XM_AFS_T { XM_AFS_2 = 0, XM_AFS_4 = 1, XM_AFS_6 = 2, XM_AFS_8 = 3, XM_AFS_16 = 4 } |
| enum | XM_ABW_T { XM_ABW_773 = 0, XM_ABW_194 = 1, XM_ABW_362 = 2, XM_ABW_50 = 3 } |
| enum | CTRL_REG3_XM_BITS_T { CTRL_REG3_XM_P1_EMPTY = 0x01, CTRL_REG3_XM_P1_DRDYM = 0x02, CTRL_REG3_XM_P1_DRDYA = 0x04, CTRL_REG3_XM_P1_INTM = 0x08, CTRL_REG3_XM_P1_INT2 = 0x10, CTRL_REG3_XM_P1_INT1 = 0x20, CTRL_REG3_XM_P1_TAP = 0x40, CTRL_REG3_XM_P1_BOOT = 0x80 } |
| enum | CTRL_REG4_XM_BITS_T { CTRL_REG4_XM_P2_WTM = 0x01, CTRL_REG4_XM_P2_OVERRUN = 0x02, CTRL_REG4_XM_P2_DRDYM = 0x04, CTRL_REG4_XM_P2_DRDYA = 0x08, CTRL_REG4_XM_P2_INTM = 0x10, CTRL_REG4_XM_P2_INT2 = 0x20, CTRL_REG4_XM_P2_INT1 = 0x40, CTRL_REG4_XM_P2_TAP = 0x80 } |
| enum | CTRL_REG5_XM_BITS_T { CTRL_REG5_XM_LIR1 = 0x01, CTRL_REG5_XM_LIR2 = 0x02, CTRL_REG5_XM_ODR0 = 0x04, CTRL_REG5_XM_ODR1 = 0x08, CTRL_REG5_XM_ODR2 = 0x10, _CTRL_REG5_XM_ODR_MASK = 7, _CTRL_REG5_XM_ODR_SHIFT = 2, CTRL_REG5_XM_RES0 = 0x20, CTRL_REG5_XM_RES1 = 0x40, _CTRL_REG5_XM_RES_MASK = 3, _CTRL_REG5_XM_RES_SHIFT = 5, CTRL_REG5_XM_TEMP_EN = 0x80 } |
| enum | XM_ODR_T { XM_ODR_3_125 = 0, XM_ODR_6_25 = 1, XM_ODR_12_5 = 2, XM_ODR_25 = 3, XM_ODR_50 = 4, XM_ODR_100 = 5 } |
| enum | XM_RES_T { XM_RES_LOW = 0, XM_RES_HIGH = 3 } |
| enum | CTRL_REG6_XM_BITS_T { CTRL_REG6_XM_MFS0 = 0x20, CTRL_REG6_XM_MFS1 = 0x40, _CTRL_REG6_XM_MFS_MASK = 3, _CTRL_REG6_XM_MFS_SHIFT = 5 } |
| enum | XM_MFS_T { XM_MFS_2 = 0, XM_MFS_4 = 1, XM_MFS_8 = 2, XM_MFS_12 = 3 } |
| enum | CTRL_REG7_XM_BITS_T { CTRL_REG7_XM_MD0 = 0x01, CTRL_REG7_XM_MD1 = 0x02, _CTRL_REG7_XM_MD_MASK = 3, _CTRL_REG7_XM_MD_SHIFT = 0, CTRL_REG7_XM_MLP = 0x04, CTRL_REG7_XM_AFDS = 0x20, CTRL_REG7_XM_AHPM0 = 0x40, CTRL_REG7_XM_AHPM1 = 0x80, _CTRL_REG7_XM_AHPM_MASK = 3, _CTRL_REG7_XM_AHPM_SHIFT = 6 } |
| enum | XM_MD_T { XM_MD_CONTINUOUS = 0, XM_MD_SINGLE = 1, XM_MD_POWERDOWN = 2 } |
| enum | XM_AHPM_T { XM_AHPM_NORMAL_REF = 0, XM_AHPM_REFERENCE = 1, XM_AHPM_NORMAL = 2, XM_AHPM_AUTORESET = 3 } |
| enum | STATUS_REG_A_BITS_T { STATUS_REG_A_XADA = 0x01, STATUS_REG_A_YADA = 0x02, STATUS_REG_A_ZADA = 0x04, STATUS_REG_A_ZYXADA = 0x08, STATUS_REG_A_XAOR = 0x10, STATUS_REG_A_YAOR = 0x20, STATUS_REG_A_ZAOR = 0x40, STATUS_REG_A_ZYXAOR = 0x80 } |
| enum | FIFO_CTRL_REG_T { FIFO_CTRL_REG_FTH0 = 0x01, FIFO_CTRL_REG_FTH1 = 0x02, FIFO_CTRL_REG_FTH2 = 0x04, FIFO_CTRL_REG_FTH3 = 0x08, FIFO_CTRL_REG_FTH4 = 0x10, _FIFO_CTRL_REG_FTH_MASK = 31, _FIFO_CTRL_REG_FTH_SHIFT = 0, FIFO_CTRL_REG_FM0 = 0x20, FIFO_CTRL_REG_FM1 = 0x40, FIFO_CTRL_REG_FM2 = 0x80, _FIFO_CTRL_REG_FM_MASK = 7, _FIFO_CTRL_REG_FM_SHIFT = 5 } |
| enum | FM_T { FM_BYPASS = 0, FM_FIFO = 1, FM_STREAM = 2, FM_STREAM2FIFO = 3, FM_BYPASS2STREAM = 4 } |
| enum | FIFO_SRC_REG_BITS_T { FIFO_CTRL_REG_FSS0 = 0x01, FIFO_CTRL_REG_FSS1 = 0x02, FIFO_CTRL_REG_FSS2 = 0x04, FIFO_CTRL_REG_FSS3 = 0x08, FIFO_CTRL_REG_FSS4 = 0x10, _FIFO_CTRL_REG_FSS_MASK = 31, _FIFO_CTRL_REG_FSS_SHIFT = 0, FIFO_CTRL_REG_EMPTY = 0x20, FIFO_CTRL_REG_OVRN = 0x40, FIFO_CTRL_REG_WTM = 0x80 } |
| enum | INT_GEN_X_REG_BITS_T { INT_GEN_X_REG_XLIE_XDOWNE = 0x01, INT_GEN_X_REG_XHIE_XUPE = 0x02, INT_GEN_X_REG_YLIE_YDOWNE = 0x04, INT_GEN_X_REG_YHIE_YUPE = 0x08, INT_GEN_X_REG_ZLIE_ZDOWNE = 0x10, INT_GEN_X_REG_ZHIE_ZUPE = 0x20, INT_GEN_X_REG_6D = 0x40, INT_GEN_X_REG_AOI = 0x80 } |
| enum | INT_GEN_X_SRC_BITS_T { INT_GEN_X_SRC_XL = 0x01, INT_GEN_X_SRC_XH = 0x02, INT_GEN_X_SRC_YL = 0x04, INT_GEN_X_SRC_YH = 0x08, INT_GEN_X_SRC_ZL = 0x10, INT_GEN_X_SRC_ZH = 0x20, INT_GEN_X_SRC_IA = 0x40 } |
| enum | INT_GEN_X_THS_BITS_T { INT_GEN_X_THS0 = 0x01, INT_GEN_X_THS1 = 0x02, INT_GEN_X_THS2 = 0x04, INT_GEN_X_THS3 = 0x08, INT_GEN_X_THS4 = 0x10, INT_GEN_X_THS5 = 0x20, INT_GEN_X_THS6 = 0x40, _INT_GEN_X_THS_MASK = 127, _INT_GEN_X_THS_SHIFT = 0 } |
| enum | INT_GEN_X_DUR_BITS_T { INT_GEN_X_DUR0 = 0x01, INT_GEN_X_DUR1 = 0x02, INT_GEN_X_DUR2 = 0x04, INT_GEN_X_DUR3 = 0x08, INT_GEN_X_DUR4 = 0x10, INT_GEN_X_DUR5 = 0x20, INT_GEN_X_DUR6 = 0x40, _INT_GEN_X_DUR_MASK = 127, _INT_GEN_X_DUR_SHIFT = 0 } |
| enum | CLICK_CONFIG_BITS_T { CLICK_CONFIG_XS = 0x01, CLICK_CONFIG_XD = 0x02, CLICK_CONFIG_YS = 0x04, CLICK_CONFIG_YD = 0x08, CLICK_CONFIG_ZS = 0x10, CLICK_CONFIG_ZD = 0x20 } |
| enum | CLICK_SRC_BITS_T { CLICK_SRC_X = 0x01, CLICK_SRC_Y = 0x02, CLICK_SRC_Z = 0x04, CLICK_SRC_SIGN = 0x08, CLICK_SRC_SCLICK = 0x10, CLICK_SRC_DCLICK = 0x20, CLICK_SRC_IA = 0x40 } |
| enum | CLICK_THS_BITS_T { CLICK_THS_THS0 = 0x01, CLICK_THS_THS1 = 0x02, CLICK_THS_THS2 = 0x04, CLICK_THS_THS3 = 0x08, CLICK_THS_THS4 = 0x10, CLICK_THS_THS5 = 0x20, CLICK_THS_THS6 = 0x40, _CLICK_THS_THS_MASK = 127, _CLICK_THS_THS_SHIFT = 0 } |
| enum | CLICK_TIME_LIMIT_BITS_T { CLICK_TIME_LIMIT_TLI0 = 0x01, CLICK_TIME_LIMIT_TLI1 = 0x02, CLICK_TIME_LIMIT_TLI2 = 0x04, CLICK_TIME_LIMIT_TLI3 = 0x08, CLICK_TIME_LIMIT_TLI4 = 0x10, CLICK_TIME_LIMIT_TLI5 = 0x20, CLICK_TIME_LIMIT_TLI6 = 0x40, _CLICK_TIME_LIMIT_TLI_MASK = 127, _CLICK_TIME_LIMIT_TLI_SHIFT = 0 } |
| enum | ACT_THS_BITS_T { ACT_THS_ACTH0 = 0x01, ACT_THS_ACTH1 = 0x02, ACT_THS_ACTH2 = 0x04, ACT_THS_ACTH3 = 0x08, ACT_THS_ACTH4 = 0x10, ACT_THS_ACTH5 = 0x20, ACT_THS_ACTH6 = 0x40, _ACT_THS_ACTH_MASK = 127, _ACT_THS_ACTH_SHIFT = 0 } |
| enum | DEVICE_T { DEV_GYRO, DEV_XM } |
| enum | INTERRUPT_PINS_T { INTERRUPT_G_INT, INTERRUPT_G_DRDY, INTERRUPT_XM_GEN1, INTERRUPT_XM_GEN2 } |
Public Member Functions | |
| LSM9DS0 (int bus=LSM9DS0_I2C_BUS, uint8_t gAddress=LSM9DS0_DEFAULT_GYRO_ADDR, uint8_t xmAddress=LSM9DS0_DEFAULT_XM_ADDR) | |
| ~LSM9DS0 () | |
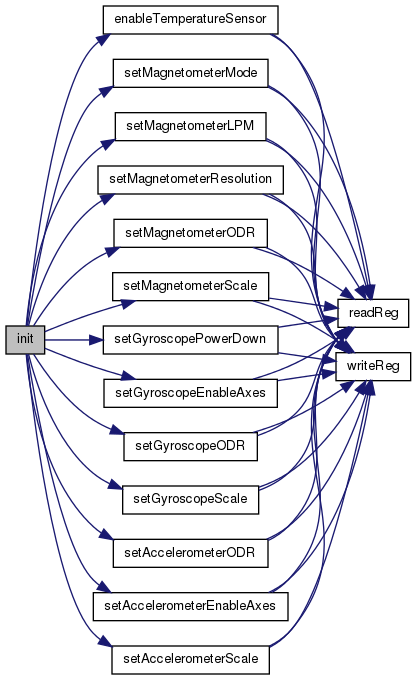
| bool | init () |
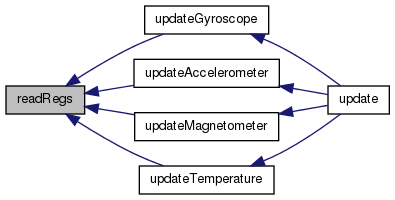
| void | update () |
| void | updateGyroscope () |
| void | updateAccelerometer () |
| void | updateMagnetometer () |
| void | updateTemperature () |
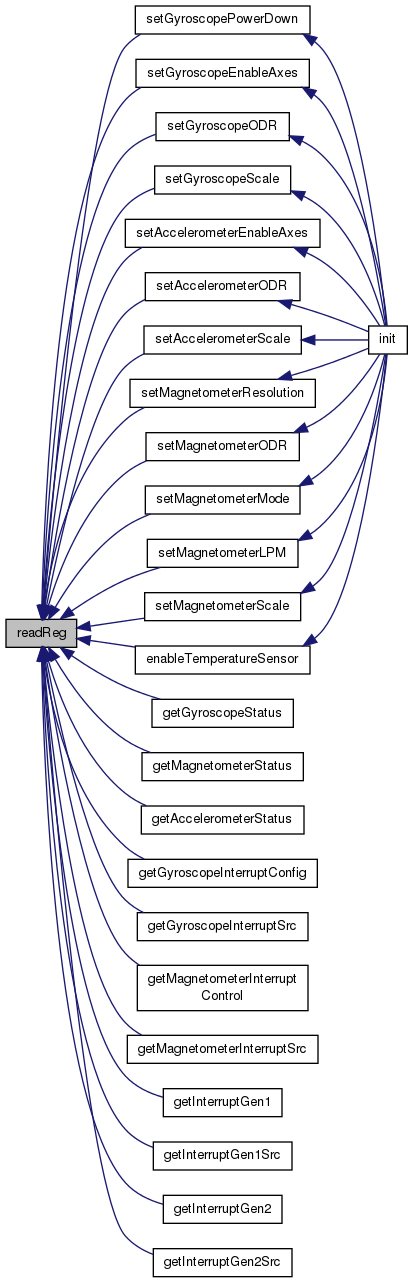
| uint8_t | readReg (DEVICE_T dev, uint8_t reg) |
| void | readRegs (DEVICE_T dev, uint8_t reg, uint8_t *buffer, int len) |
| bool | writeReg (DEVICE_T dev, uint8_t reg, uint8_t val) |
| bool | setGyroscopePowerDown (bool enable) |
| bool | setGyroscopeEnableAxes (uint8_t axes) |
| bool | setGyroscopeODR (G_ODR_T odr) |
| bool | setGyroscopeScale (G_FS_T scale) |
| bool | setAccelerometerEnableAxes (uint8_t axes) |
| bool | setAccelerometerODR (XM_AODR_T odr) |
| bool | setAccelerometerScale (XM_AFS_T scale) |
| bool | setMagnetometerResolution (XM_RES_T res) |
| bool | setMagnetometerODR (XM_ODR_T odr) |
| bool | setMagnetometerMode (XM_MD_T mode) |
| bool | setMagnetometerLPM (bool enable) |
| bool | setMagnetometerScale (XM_MFS_T scale) |
| void | getAccelerometer (float *x, float *y, float *z) |
| void | getGyroscope (float *x, float *y, float *z) |
| void | getMagnetometer (float *x, float *y, float *z) |
| float | getTemperature () |
| bool | enableTemperatureSensor (bool enable) |
| uint8_t | getGyroscopeStatus () |
| uint8_t | getMagnetometerStatus () |
| uint8_t | getAccelerometerStatus () |
| uint8_t | getGyroscopeInterruptConfig () |
| bool | setGyroscopeInterruptConfig (uint8_t enables) |
| uint8_t | getGyroscopeInterruptSrc () |
| uint8_t | getMagnetometerInterruptControl () |
| bool | setMagnetometerInterruptControl (uint8_t enables) |
| uint8_t | getMagnetometerInterruptSrc () |
| uint8_t | getInterruptGen1 () |
| bool | setInterruptGen1 (uint8_t enables) |
| uint8_t | getInterruptGen1Src () |
| uint8_t | getInterruptGen2 () |
| bool | setInterruptGen2 (uint8_t enables) |
| uint8_t | getInterruptGen2Src () |
| void | installISR (INTERRUPT_PINS_T intr, int gpio, mraa::Edge level, void(*isr)(void *), void *arg) |
| void | uninstallISR (INTERRUPT_PINS_T intr) |
| LSM9DS0 | ( | int | bus = LSM9DS0_I2C_BUS, |
| uint8_t | gAddress = LSM9DS0_DEFAULT_GYRO_ADDR, |
||
| uint8_t | xmAddress = LSM9DS0_DEFAULT_XM_ADDR |
||
| ) |
lsm9ds0 constructor
| bus | i2c bus to use |
| address | the address for this device |
| bool init | ( | ) |
set up initial values and start operation
| void update | ( | void | ) |
update the accelerometer, gyroscope, magnetometer and termperature values.
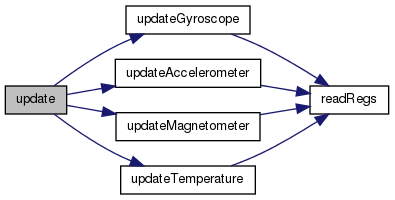
| void updateGyroscope | ( | ) |
update the gyroscope values only


| void updateAccelerometer | ( | ) |
update the accelerometer values only


| void updateMagnetometer | ( | ) |
update the magnetometer values only


| void updateTemperature | ( | ) |
update the temperature value only


| uint8_t readReg | ( | DEVICE_T | dev, |
| uint8_t | reg | ||
| ) |
read a register
| dev | the device to access (XM or G) |
| reg | the register to read |
| void readRegs | ( | DEVICE_T | dev, |
| uint8_t | reg, | ||
| uint8_t * | buffer, | ||
| int | len | ||
| ) |
read contiguous register into a buffer
| dev | the device to access (XM or G) |
| reg | the register to start reading at |
| buf | the buffer to store the results |
| len | the number of registers to read |
| bool writeReg | ( | DEVICE_T | dev, |
| uint8_t | reg, | ||
| uint8_t | val | ||
| ) |
write to a register
| dev | the device to access (XM or G) |
| reg | the register to write to |
| val | the value to write |
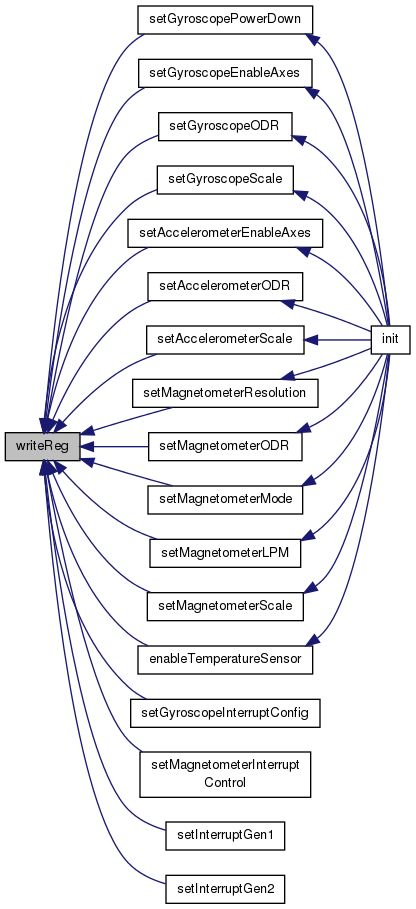
| bool setGyroscopePowerDown | ( | bool | enable | ) |
enable or disable the gyro power down mode
| enable | true to put device to sleep, false to wake up |

| bool setGyroscopeEnableAxes | ( | uint8_t | axes | ) |
enable or disable gyroscope axes. If all axis are disabled, and powerdown mode is not set, then the gyro goes into sleep mode.
| axes | bit mask of valid axes, (CTRL_REG1_G_YEN, ...) |

| bool setGyroscopeODR | ( | G_ODR_T | odr | ) |
set the gyroscope Output Data Rate (ODR)
| odr | one of the G_ODR_T values |

| bool setGyroscopeScale | ( | G_FS_T | scale | ) |
set the scaling mode of the gyroscope
| scale | one of the G_FS_T values |

| bool setAccelerometerEnableAxes | ( | uint8_t | axes | ) |
enable or disable accelerometer axes.
| axes | bit mask of valid axes, (CTRL_REG1_XM_AXEN, ...) |

| bool setAccelerometerODR | ( | XM_AODR_T | odr | ) |
set the accelerometer Output Data Rate (ODR)
| odr | one of the XM_AODR_T values |

| bool setAccelerometerScale | ( | XM_AFS_T | scale | ) |
set the scaling mode of the accelerometer
| scale | one of the XM_AFS_T values |

| bool setMagnetometerResolution | ( | XM_RES_T | res | ) |
set the magnetometer resolution
| res | one of the XM_RES_T values |

| bool setMagnetometerODR | ( | XM_ODR_T | odr | ) |
set the magnetometer Output Data Rate (ODR)
| odr | one of the XM_ODR_T values |

| bool setMagnetometerMode | ( | XM_MD_T | mode | ) |
set the magnetometer sensor mode
| mode | one of the XM_MD_T values |

| bool setMagnetometerLPM | ( | bool | enable | ) |
enable or disable magnetometer low power mode (LPM). When in low power mode, the magnetometer updates at 3.125Hz, regardless of it's ODR setting.
| enable | true to enable LPM, false otherwise |

| bool setMagnetometerScale | ( | XM_MFS_T | scale | ) |
set the scaling mode of the magnetometer
| scale | one of the XM_MFS_T values |

| void getAccelerometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
get the accelerometer values in gravities
| x | the returned x value, if arg is non-NULL |
| y | the returned y value, if arg is non-NULL |
| z | the returned z value, if arg is non-NULL |
| void getGyroscope | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
get the gyroscope values in degrees per second
| x | the returned x value, if arg is non-NULL |
| y | the returned y value, if arg is non-NULL |
| z | the returned z value, if arg is non-NULL |
| void getMagnetometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
get the magnetometer values in gauss
| x | the returned x value, if arg is non-NULL |
| y | the returned y value, if arg is non-NULL |
| z | the returned z value, if arg is non-NULL |
| float getTemperature | ( | void | ) |
get the temperature value. Unfortunately the datasheet does not provide a mechanism to convert the temperature value into the correct value, so I made a 'guess'. If it's wrong, and you figure it out, send a patch!
| bool enableTemperatureSensor | ( | bool | enable | ) |
enable onboard temperature measurement sensor
| enable | true to enable temperature sensor, false to disable |

| uint8_t getGyroscopeStatus | ( | ) |
return the gyroscope status register

| uint8_t getMagnetometerStatus | ( | ) |
return the magnetometer status register

| uint8_t getAccelerometerStatus | ( | ) |
return the accelerometer status register

| uint8_t getGyroscopeInterruptConfig | ( | ) |
return the gyroscope interrupt config register

| bool setGyroscopeInterruptConfig | ( | uint8_t | enables | ) |
set the gyroscope interrupt config register
| enables | bitmask of INT1_CFG_G_BITS_T values |

| uint8_t getGyroscopeInterruptSrc | ( | ) |
return the gyroscope interrupt src register

| uint8_t getMagnetometerInterruptControl | ( | ) |
return the magnetometer interrupt control register

| bool setMagnetometerInterruptControl | ( | uint8_t | enables | ) |
set the magnetometer interrupt control register
| enables | bitmask of INT_CTRL_REG_M_BITS_T values |

| uint8_t getMagnetometerInterruptSrc | ( | ) |
return the magnetometer interrupt src register

| uint8_t getInterruptGen1 | ( | ) |
return the inertial interrupt generator 1 register

| bool setInterruptGen1 | ( | uint8_t | enables | ) |
set the inertial interrupt generator 1 register
| enables | bitmask of INT_GEN_X_REG_BITS_T values |

| uint8_t getInterruptGen1Src | ( | ) |
return the inertial interrupt generator 1 src register

| uint8_t getInterruptGen2 | ( | ) |
return the inertial interrupt generator 2 register

| bool setInterruptGen2 | ( | uint8_t | enables | ) |
set the inertial interrupt generator 2 register
| enables | bitmask of INT_GEN_X_REG_BITS_T values |

| uint8_t getInterruptGen2Src | ( | ) |
return the inertial interrupt generator 2 src register

| void installISR | ( | INTERRUPT_PINS_T | intr, |
| int | gpio, | ||
| mraa::Edge | level, | ||
| void(*)(void *) | isr, | ||
| void * | arg | ||
| ) |
install an interrupt handler.
| intr | one of the INTERRUPT_PINS_T values specifying which interrupt pin out of 4 you are installing |
| gpio | gpio pin to use as interrupt pin |
| level | the interrupt trigger level (one of mraa::Edge values). Make sure that you have configured the interrupt pin properly for whatever level you choose. |
| isr | the interrupt handler, accepting a void * argument |
| arg | the argument to pass the the interrupt handler |

| void uninstallISR | ( | INTERRUPT_PINS_T | intr | ) |
uninstall a previously installed interrupt handler
| intr | one of the INTERRUPT_PINS_T values specifying which interrupt pin out of 4 you are uninstalling |
 1.8.9.1
1.8.9.1


