|
upm
0.4.1
Sensor/Actuator repository for libmraa (v0.8.0)
|
|
upm
0.4.1
Sensor/Actuator repository for libmraa (v0.8.0)
|
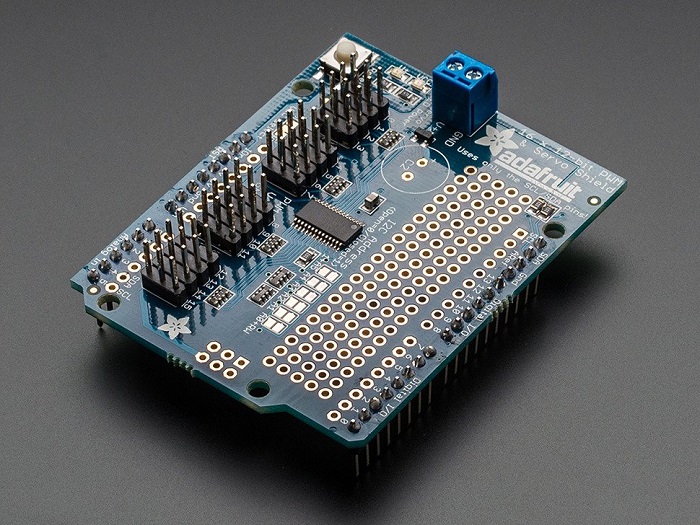
API for the Adafruit Servo Shield. More...
UPM library for the PCA9685-based Adafruit 16-channel servo shield. If 3 or more GWS servos are attached, results could be unpredictable. Adafruit Industries recommend installing a capacitor on the board, which should alleviate the issue. Sizing depends on servos and their number.
Public Member Functions | |
| synchronized void | delete () |
| adafruitss (int bus, int i2c_address) | |
| int | update () |
| void | setPWMFreq (float freq) |
| void | servo (short port, short servo_type, float degrees) |
| adafruitss | ( | int | bus, |
| int | i2c_address | ||
| ) |
Creates an adafruitss object
| bus | Number of the used I2C bus |
| i2c_address | Address of the servo shield on the I2C bus |
| void servo | ( | short | port, |
| short | servo_type, | ||
| float | degrees | ||
| ) |
Moves one of the servos to a specified angle
| port | Port of the servo on the shield (servo number) |
| servo_type | Can be 0 = standard (1ms to 2ms), 1 = extended (0.6ms to 2.4ms), or 2 = extended (0.8ms to 2.2ms) |
| degrees | Angle to set the servo to |
| void setPWMFreq | ( | float | freq | ) |
Sets the frequency of the servos
| freq | Frequency at which the servos operate |
 1.8.9.1
1.8.9.1

