|
upm
0.5.1
Sensor/Actuator repository for libmraa (v0.9.1)
|
|
upm
0.5.1
Sensor/Actuator repository for libmraa (v0.9.1)
|
API for the HP20X-based Grove Barometer (High-Accuracy) More...
This is a high-accuracy barometer providing pressure, altitude, and temperature data. It can be calibrated for a given altitude offset, and a wide range of interrupt generating capabilities are supported. As usual, see the HP20X datasheet for more details.
This module was developed using a Grove Barometer (High-Accuracy) based on an HP206C chip.

Public Types | |
| enum | HP20X_CMD_T { CMD_SOFT_RST = 0x06, CMD_ADC_CVT = 0x40, CMD_READ_PT = 0x10, CMD_READ_AT = 0x11, CMD_READ_P = 0x30, CMD_READ_A = 0x31, CMD_READ_T = 0x32, CMD_ANA_CAL = 0x28, CMD_READ_REG = 0x80, CMD_WRITE_REG = 0xc0 } |
| enum | CHNL_BITS_T { CHNL_PT = 0x00, CHNL_T = 0x02, CHNL_SHIFT = 0 } |
| enum | DSR_BITS_T { DSR_4096 = 0x00, DSR_2048 = 0x01, DSR_1024 = 0x02, DSR_512 = 0x03, DSR_256 = 0x04, DSR_128 = 0x05, DSR_SHIFT = 2 } |
| enum | HP20X_REG_T { REG_ALT_OFF_LSB = 0x00, REG_ALT_OFF_MSB = 0x01, REG_PA_H_TH_LSB = 0x02, REG_PA_H_TH_MSB = 0x03, REG_PA_M_TH_LSB = 0x04, REG_PA_M_TH_MSB = 0x05, REG_PA_L_TH_LSB = 0x06, REG_PA_L_TH_MSB = 0x07, REG_T_H_TH = 0x08, REG_T_M_TH = 0x09, REG_T_L_TH = 0x0a, REG_INT_EN = 0x0b, REG_INT_CFG = 0x0c, REG_INT_SRC = 0x0d, REG_PARA = 0x0e } |
| enum | INT_EN_BITS_T { INT_EN_T_WIN_EN = 0x01, INT_EN_PA_WIN_EN = 0x02, INT_EN_T_TRAV_EN = 0x04, INT_EN_PA_TRAV_EN = 0x08, INT_EN_T_RDY_EN = 0x10, INT_EN_PA_RDY_EN = 0x20 } |
| enum | INT_CFG_BITS_T { INT_CFG_T_WIN_CFG = 0x01, INT_CFG_PA_WIN_CFG = 0x02, INT_CFG_T_TRAV_CFG = 0x04, INT_CFG_PA_TRAV_CFG = 0x08, INT_CFG_T_RDY_CFG = 0x10, INT_CFG_PA_RDY_CFG = 0x20, INT_CFG_PA_MODE = 0x40 } |
| enum | INT_SRC_BITS_T { INT_SRC_T_WIN = 0x01, INT_SRC_PA_WIN = 0x02, INT_SRC_T_TRAV = 0x04, INT_SRC_PA_TRAV = 0x08, INT_SRC_T_RDY = 0x10, INT_SRC_PA_RDY = 0x20, INT_SRC_DEV_RDY = 0x40, INT_SRC_TH_ERR = 0x80 } |
| enum | PARA_BITS_T { PARA_CMPS_EN = 0x80 } |
Public Member Functions | |
| HP20X (int bus=HP20X_I2C_BUS, uint8_t address=HP20X_DEFAULT_I2C_ADDR) | |
| ~HP20X () | |
| bool | init (DSR_BITS_T dsr=DSR_4096) |
| bool | writeCmd (uint8_t cmd) |
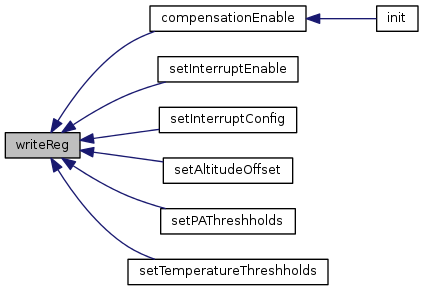
| bool | writeReg (HP20X_REG_T reg, uint8_t data) |
| uint8_t | readReg (HP20X_REG_T reg) |
| int | readData () |
| bool | isReady () |
| bool | waitforDeviceReady () |
| float | getTemperature () |
| float | getPressure () |
| float | getAltitude () |
| void | compensationEnable (bool enable) |
| bool | setInterruptEnable (uint8_t bits) |
| bool | setInterruptConfig (uint8_t bits) |
| uint8_t | getInterruptSource () |
| void | setDSR (DSR_BITS_T dsr) |
| void | recalibrateInternal () |
| void | softReset () |
| void | setAltitudeOffset (int16_t off) |
| void | setPAThreshholds (int16_t low, int16_t med, int16_t high) |
| void | setTemperatureThreshholds (int8_t low, int8_t med, int8_t high) |
Protected Attributes | |
| mraa::I2c | m_i2c |
| enum HP20X_CMD_T |
HP20X commands
| enum CHNL_BITS_T |
CHNL bits
| enum DSR_BITS_T |
DSR bits
| enum HP20X_REG_T |
HP20X registers
| enum INT_EN_BITS_T |
INT_EN bits
| enum INT_CFG_BITS_T |
INT_CFG bits
| enum INT_SRC_BITS_T |
INT_SRC bits
| enum PARA_BITS_T |
PARA bits
| HP20X | ( | int | bus = HP20X_I2C_BUS, |
| uint8_t | address = HP20X_DEFAULT_I2C_ADDR |
||
| ) |
HP20X constructor
| bus | I2C bus to use |
| address | Address for this device |
| bool init | ( | DSR_BITS_T | dsr = DSR_4096 | ) |
Sets up initial values and starts operation
| dsr | Data sampling rate; one of the DSR_BITS_T values |

| bool writeCmd | ( | uint8_t | cmd | ) |
Sends a command to the device
| cmd | Command to send; usually, one of the HP20X_CMD_T values |

| bool writeReg | ( | HP20X_REG_T | reg, |
| uint8_t | data | ||
| ) |
Writes a value to a register
| reg | Register to write to; one of the HP20X_REG_T values |
| data | Value to write |

| uint8_t readReg | ( | HP20X_REG_T | reg | ) |
Reads a register and returns its value
| reg | Register to read; one of the HP20X_REG_T values |

| int readData | ( | ) |
Reads 3 bytes of data in response to a conversion request, and converts it to an integer

| bool isReady | ( | ) |
Checks to see if the DR_RDY bit is set, indicating the device can accept commands

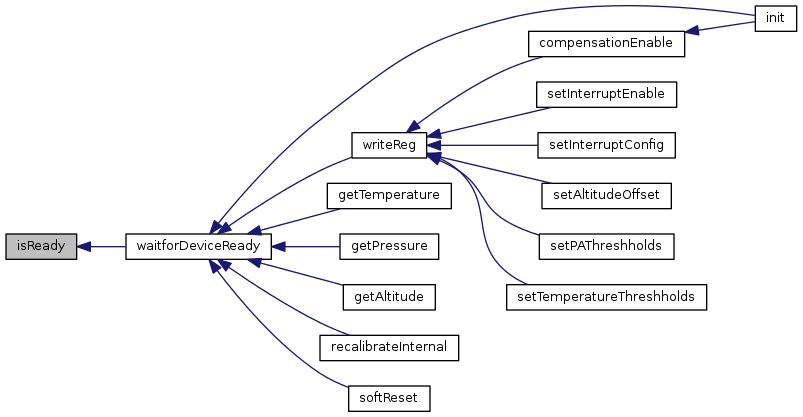
| bool waitforDeviceReady | ( | ) |
Checks to see if the device is ready, and sleeps/retries if not. Returns once the device indicates it's ready.


| float getTemperature | ( | void | ) |
Returns the temperature in Celsius

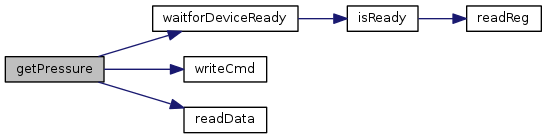
| float getPressure | ( | ) |
Returns the pressure in millibars
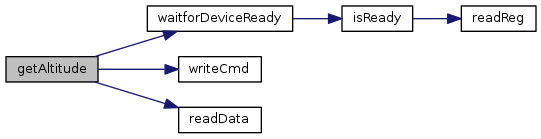
| float getAltitude | ( | ) |
Returns the computed altitude in meters
| void compensationEnable | ( | bool | enable | ) |
Enables or disables the on-chip compensator. This allows the chip to filter and clean up the output data.
| enable | True to enable, false otherwise |


| bool setInterruptEnable | ( | uint8_t | bits | ) |
Sets up the interrupt enable register. This register defines which events can cause a hardware interrupt pin to be pulled high (active).
| bits | One or more of the INT_EN_BITS_T bits |

| bool setInterruptConfig | ( | uint8_t | bits | ) |
Sets up the interrupt configuration register. This register defines which events can cause an interrupt to be indicated.
| bits | One or more of the INT_EN_BITS_T bits |

| uint8_t getInterruptSource | ( | ) |
Gets the interrupt source register. This register indicates which interrupts have been triggered. In addition, it indicates when certain operations have been completed.

| void setDSR | ( | DSR_BITS_T | dsr | ) |
Sets the data sampling rate. Higher rates are more precise, but take more time per measurement.
| dsr | One of the DSR_BITS_T values |
| void recalibrateInternal | ( | ) |
Starts an internal recalibration of analog blocks. This is faster than a soft reset.

| void softReset | ( | ) |
Executes a soft reset. All register values are reset to power-on defaults. This function returns when the reset is complete and the device reports it is ready.

| void setAltitudeOffset | ( | int16_t | off | ) |
Sets the altitude offset for your region. See the datasheet for more details. Setting this correctly for your region is required for accurate altitude data.
| off | Offset |

| void setPAThreshholds | ( | int16_t | low, |
| int16_t | med, | ||
| int16_t | high | ||
| ) |
Sets pressure/altitude thresholds for interrupt generation
| low | Low threshold to generate an interrupt |
| med | Medium threshold to generate an interrupt |
| high | High threshold to generate an interrupt |

| void setTemperatureThreshholds | ( | int8_t | low, |
| int8_t | med, | ||
| int8_t | high | ||
| ) |
Sets temperature thresholds for interrupt generation
| low | Low threshold to generate an interrupt |
| med | Medium threshold to generate an interrupt |
| high | High threshold to generate an interrupt |

 1.8.6
1.8.6

