| CurieImu |
( |
int |
subplatform_offset = 512 | ) |
|
Instantiates a CurieImu object
- Parameters
-
| subplatformoffset | Subplatform offset |
Updates the latest accelerometer readings by calling Firmata
Updates the latest gyroscope readings by calling Firmata
Updates the both the latest accelerometer & gyroscope readings by calling Firmata
Returns last accelerometer reading X, Y, and Z axis
- Returns
- pointer to array with X-axis, Y-axis & Z-axis value
Returns last accelerometer reading X axis
- Returns
- X-axis value
Returns last accelerometer reading Y axis
- Returns
- Y-axis value
Returns last accelerometer reading Z axis
- Returns
- Z-axis value
Read gyroscope X, Y, and Z axis
- Returns
- pointer to array with X-axis, Y-axis & Z-axis value
Returns last gyroscope reading X axis
- Returns
- X-axis value
Returns last gyroscope reading Y axis
- Returns
- Y-axis value
Returns last gyroscope reading Z axis
- Returns
- Z-axis value
| int16_t getTemperature |
( |
void |
| ) |
|
Reads the internal temperature
- Returns
- 16-bit integer containing the scaled temperature reading
Reads the X, Y, and Z axis of both gyroscope and accelerometer
- Returns
- pointer to array with X-axis, Y-axis & Z-axis values for accelerometer, and then X-axis, Y-axis & Z-axis values for gyroscope
Returns last shock or tap axis reading
- Returns
- axis value
Returns last shock or tap direction reading
- Returns
- direction value
| void enableShockDetection |
( |
bool |
enable | ) |
|
Turns shock detection notifications on/off
- Parameters
-
| enable | enables/disables notifications |
Has there been a shock detected?
- Returns
- true if any unprocessed shock notifications are in the queue
Gets shock detect data from queue. Then m_axis gets axis data, and m_direction gets direction data
| void enableStepCounter |
( |
bool |
enable | ) |
|
Turns step counter notifications on/off
- Parameters
-
| enable | enables/disables notifications |
Has there been a step detected?
- Returns
- true if any unprocessed step notifications are in the queue
Gets step count data from queue
- Returns
- the total number of steps taken
| void enableTapDetection |
( |
bool |
enable | ) |
|
Turns tap detection notifications on/off
- Parameters
-
| enable | enables/disables notifications |
Has there been a tap detected?
- Returns
- true if any unprocessed tap notifications are in the queue
Gets tap detect data from queue. Then m_axis gets axis data, and m_direction gets direction data
Locks responses from Firmata
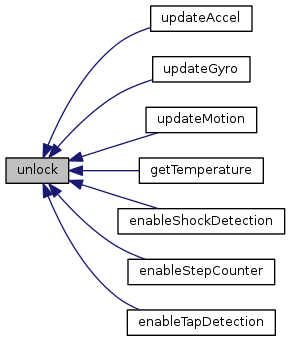
Unlocks responses from Firmata
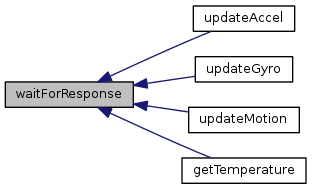
Wait for a response from Firmata before proceeding
Proceed with original function call now that response from Firmata has been received
| void setResults |
( |
uint8_t * |
buf, |
|
|
int |
length |
|
) |
| |
Set results being returned from Firmata for processing
- Parameters
-
| buf | is the buffer |
| length | is the length of results buffer |
Processes asyncronous responses returned from Firmata
The documentation for this class was generated from the following files:
- /iotdk/jenkins/workspace/upm-doc-stable/src/curieimu/curieimu.hpp
- /iotdk/jenkins/workspace/upm-doc-stable/src/curieimu/curieimu.cpp


 1.8.6
1.8.6