|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
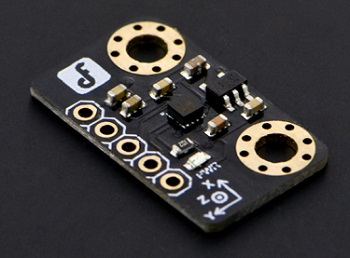
API for the BMA220 3-axis Accelerometer. More...
The BMA220 is a low cost, very small 3-axis accelerometer with 6 bits of resolution. It can also detect orientation and tap events.
The BMA220 has a linear acceleration full scale of 2g/4g/8g/16g.
While not all of the functionality of this device is supported initially, methods and register definitions are provided that should allow an end user to implement whatever features are required.
This driver was developed on a DFRobot BMA (Tiny).
Public Types | |
| enum | REG_T { REG_CHIPID = 0x00, REG_REVISIONID = 0x02, REG_ACC_X = 0x04, REG_ACC_Y = 0x06, REG_ACC_Z = 0x08, REG_H_HYST_DUR = 0x0a, REG_THRESHOLD = 0x0c, REG_L_HYST_DUR = 0x0e, REG_TAP_CONFIG = 0x10, REG_SLOPE_CONFIG = 0x12, REG_TAP_CONFIG2 = 0x14, REG_INT_STATUS1 = 0x16, REG_INT_STATUS2 = 0x18, REG_ENABLE_CONFIG = 0x1a, REG_ENABLE_CONFIG2 = 0x1c, REG_ENABLE_CONFIG3 = 0x1e, REG_FILTER_CONFIG = 0x20, REG_SBIST_FSL_CONFIG = 0x22, REG_I2C_WATCHDOG = 0x2e, REG_SUSPEND = 0x30, REG_SOFTRESET = 0x32 } |
| enum | H_HYST_DUR_HIGH_BITS_T { H_HYST_DUR_HIGH_DUR0 = 0x01, H_HYST_DUR_HIGH_DUR1 = 0x02, H_HYST_DUR_HIGH_DUR2 = 0x04, H_HYST_DUR_HIGH_DUR3 = 0x08, H_HYST_DUR_HIGH_DUR4 = 0x10, H_HYST_DUR_HIGH_DUR5 = 0x20, _H_HYST_DUR_HIGH_DUR_MASK = 63, _H_HYST_DUR_HIGH_DUR_SHIFT = 0, H_HYST_DUR_HIGH_HY1 = 0x40, H_HYST_DUR_HIGH_HY2 = 0x80, _H_HYST_DUR_HIGH_HY_MASK = 3, _H_HYST_DUR_HIGH_HY_SHIFT = 6 } |
| enum | THRESHOLD_BITS_T { THRESHOLD_HIGH0 = 0x01, THRESHOLD_HIGH1 = 0x02, THRESHOLD_HIGH2 = 0x04, THRESHOLD_HIGH3 = 0x08, _THRESHOLD_HIGH_MASK = 15, _THRESHOLD_HIGH_SHIFT = 0, THRESHOLD_LOW0 = 0x10, THRESHOLD_LOW1 = 0x20, THRESHOLD_LOW2 = 0x40, THRESHOLD_LOW3 = 0x80, _THRESHOLD_LOW_MASK = 15, _THRESHOLD_LOW_SHIFT = 4 } |
| enum | L_HYST_DUR_LOW_BITS_T { L_HYST_DUR_LOW_DUR0 = 0x01, L_HYST_DUR_LOW_DUR1 = 0x02, L_HYST_DUR_LOW_DUR2 = 0x04, L_HYST_DUR_LOW_DUR3 = 0x08, L_HYST_DUR_LOW_DUR4 = 0x10, L_HYST_DUR_LOW_DUR5 = 0x20, _L_HYST_DUR_LOW_DUR_MASK = 63, _L_HYST_DUR_LOW_DUR_SHIFT = 0, L_HYST_DUR_LOW_HY1 = 0x40, L_HYST_DUR_LOW_HY2 = 0x80, _L_HYST_DUR_LOW_HY_MASK = 3, _L_HYST_DUR_LOW_HY_SHIFT = 6 } |
| enum | TAP_CONFIG_BITS_T { TAP_CONFIG_DUR0 = 0x01, TAP_CONFIG_DUR1 = 0x02, TAP_CONFIG_DUR2 = 0x04, _TAP_CONFIG_DUR_MASK = 7, _TAP_CONFIG_DUR_SHIFT = 0, TAP_CONFIG_THRESH0 = 0x08, TAP_CONFIG_THRESH1 = 0x10, TAP_CONFIG_THRESH2 = 0x20, TAP_CONFIG_THRESH3 = 0x40, _TAP_CONFIG_THRESH_MASK = 15, _TAP_CONFIG_THRESH_SHIFT = 3, TAP_CONFIG_FILTER = 0x80 } |
| enum | SLOPE_CONFIG_BITS_T { SLOPE_CONFIG_DUR0 = 0x01, SLOPE_CONFIG_DUR1 = 0x02, _SLOPE_CONFIG_DUR_MASK = 3, _SLOPE_CONFIG_DUR_SHIFT = 0, SLOPE_CONFIG_THRESH0 = 0x04, SLOPE_CONFIG_THRESH1 = 0x08, SLOPE_CONFIG_THRESH2 = 0x10, SLOPE_CONFIG_THRESH3 = 0x20, _SLOPE_CONFIG_THRESH_MASK = 15, _SLOPE_CONFIG_THRESH_SHIFT = 2, SLOPE_CONFIG_FILTER = 0x40, SLOPE_CONFIG_ORIENT_EX = 0x80 } |
| enum | TAP_CONFIG2_BITS_T { TAP_CONFIG2_SAMP0 = 0x01, TAP_CONFIG2_SAMP1 = 0x02, _TAP_CONFIG2_SAMP_MASK = 3, _TAP_CONFIG2_SAMP_SHIFT = 0, TAP_CONFIG2_ORIENT_BLOCK0 = 0x04, TAP_CONFIG2_ORIENT_BLOCK1 = 0x08, _TAP_CONFIG2_ORIENT_BLOCK_MASK = 3, _TAP_CONFIG2_ORIENT_BLOCK_SHIFT = 2, TAP_CONFIG2_TIP_EN = 0x10 } |
| enum | TAP_SAMP_T { TAP_SAMP_2 = 0, TAP_SAMP_4 = 1, TAP_SAMP_8 = 2, TAP_SAMP_16 = 3 } |
| enum | TAP_ORIENT_BLOCK_T { TAP_ORIENT_BLOCK_0 = 0, TAP_ORIENT_BLOCK_2 = 1, TAP_ORIENT_BLOCK_3 = 2, TAP_ORIENT_BLOCK_4 = 3 } |
| enum | INT_STATUS1_BITS_T { INT_STATUS1_SIGN = 0x01, INT_STATUS1_FIRST_Z = 0x02, INT_STATUS1_FIRST_Y = 0x04, INT_STATUS1_FIRST_X = 0x08, INT_STATUS1_ORIENT0 = 0x10, INT_STATUS1_ORIENT1 = 0x20, INT_STATUS1_ORIENT2 = 0x40, _INT_STATUS1_ORIENT_MASK = 7, _INT_STATUS1_ORIENT_SHIFT = 4, INT_STATUS1_ORIENT_INT = 0x80 } |
| enum | CONFIG_ORIENT_T { CONFIG_ORI_UP_PORT_UPRIGHT = 0, CONFIG_ORI_UP_PORT_UPSIDE_DOWN = 1, CONFIG_ORI_UP_LAND_LEFT = 2, CONFIG_ORI_UP_LAND_RIGHT = 3, CONFIG_ORI_DN_PORT_UPRIGHT = 4, CONFIG_ORI_DN_PORT_UPSIDE_DOWN = 5, CONFIG_ORI_DN_LAND_LEFT = 6, CONFIG_ORI_DN_LAND_RIGHT = 7 } |
| enum | INT_STATUS2_BITS_T { INT_STATUS2_SLOPE = 0x01, INT_STATUS2_DATA = 0x02, INT_STATUS2_HIGH = 0x04, INT_STATUS2_LOW = 0x08, INT_STATUS2_TAP = 0x10 } |
| enum | ENABLE_CONFIG_BITS_T { ENABLE_CONFIG_TT_Z = 0x01, ENABLE_CONFIG_TT_Y = 0x02, ENABLE_CONFIG_TT_X = 0x04, ENABLE_CONFIG_SLOPE_Z = 0x08, ENABLE_CONFIG_SLOPE_Y = 0x10, ENABLE_CONFIG_SLOPE_X = 0x20, ENABLE_CONFIG_ORIENT = 0x40, ENABLE_CONFIG_DATA = 0x80 } |
| enum | ENABLE_CONFIG2_BITS_T { ENABLE_CONFIG2_HIGH_Z = 0x01, ENABLE_CONFIG2_HIGH_Y = 0x02, ENABLE_CONFIG2_HIGH_X = 0x04, ENABLE_CONFIG2_LOW = 0x08, ENABLE_CONFIG2_LAT_INT0 = 0x10, ENABLE_CONFIG2_LAT_INT1 = 0x20, ENABLE_CONFIG2_LAT_INT2 = 0x40, _ENABLE_CONFIG2_LAT_INT_MASK = 7, _ENABLE_CONFIG2_LAT_INT_SHIFT = 4, ENABLE_CONFIG2_RESET_INT = 0x80 } |
| enum | CONFIG2_LAT_T { CONFIG2_LAT_UNLATCH = 0, CONFIG2_LAT_0_25 = 1, CONFIG2_LAT_0_5 = 2, CONFIG2_LAT_1 = 3, CONFIG2_LAT_2 = 4, CONFIG2_LAT_4 = 5, CONFIG2_LAT_8 = 6, CONFIG2_LAT_PERM = 7 } |
| enum | ENABLE_CONFIG3_BITS_T { ENABLE_CONFIG3_Z_CHAN = 0x01, ENABLE_CONFIG3_Y_CHAN = 0x02, ENABLE_CONFIG3_X_CHAN = 0x04, ENABLE_CONFIG3_SLEEP_DUR0 = 0x08, ENABLE_CONFIG3_SLEEP_DUR1 = 0x10, ENABLE_CONFIG3_SLEEP_DUR2 = 0x20, _ENABLE_CONFIG3_SLEEP_DUR_MASK = 7, _ENABLE_CONFIG3_SLEEP_DUR_SHIFT = 3, ENABLE_CONFIG3_SLEEP_EN = 0x40 } |
| enum | SLEEP_DUR_T { SLEEP_DUR_2MS = 0, SLEEP_DUR_10MS = 1, SLEEP_DUR_25MS = 2, SLEEP_DUR_50MS = 3, SLEEP_DUR_100MS = 4, SLEEP_DUR_500MS = 5, SLEEP_DUR_1S = 6, SLEEP_DUR_2S = 7 } |
| enum | FILTER_CONFIG_BITS_T { FILTER_CONFIG_FILTER0 = 0x01, FILTER_CONFIG_FILTER1 = 0x02, FILTER_CONFIG_FILTER2 = 0x04, FILTER_CONFIG_FILTER3 = 0x08, _FILTER_CONFIG_FILTER_MASK = 15, _FILTER_CONFIG_FILTER_SHIFT = 0, FILTER_CONFIG_SERIAL_HIGH_BW = 0x80 } |
| enum | FILTER_CONFIG_T { FILTER_CONFIG_1KHZ = 0, FILTER_CONFIG_500HZ = 1, FILTER_CONFIG_250HZ = 2, FILTER_CONFIG_125HZ = 3, FILTER_CONFIG_64HZ = 4, FILTER_CONFIG_32HZ = 5 } |
| enum | SBIST_FSL_CONFIG_BITS_T { REG_SBIST_FSL_RANGE0 = 0x01, REG_SBIST_FSL_RANGE1 = 0x02, _REG_SBIST_FSL_RANGE_MASK = 3, _REG_SBIST_FSL_RANGE_SHIFT = 0, REG_SBIST_FSL_SBIST0 = 0x04, REG_SBIST_FSL_SBIST1 = 0x08, _REG_SBIST_FSL_SBIST_MASK = 3, _REG_SBIST_FSL_SBIST_SHIFT = 2, REG_SBIST_FSL_SBIST_SIGN = 0x10 } |
| enum | FSL_RANGE_T { FSL_RANGE_2G = 0, FSL_RANGE_4G = 1, FSL_RANGE_8G = 2, FSL_RANGE_16G = 3 } |
| enum | SBIST_T { SBIST_OFF = 0, SBIST_X = 1, SBIST_Y = 2, SBIST_Z = 3 } |
| enum | I2C_WATCHDOG_BITS_T { I2C_WATCHDOG_SPI3 = 0x01, I2C_WATCHDOG_TO_SEL = 0x02, I2C_WATCHDOG_TO_EN = 0x04 } |
Public Member Functions | |
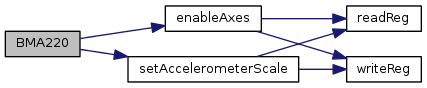
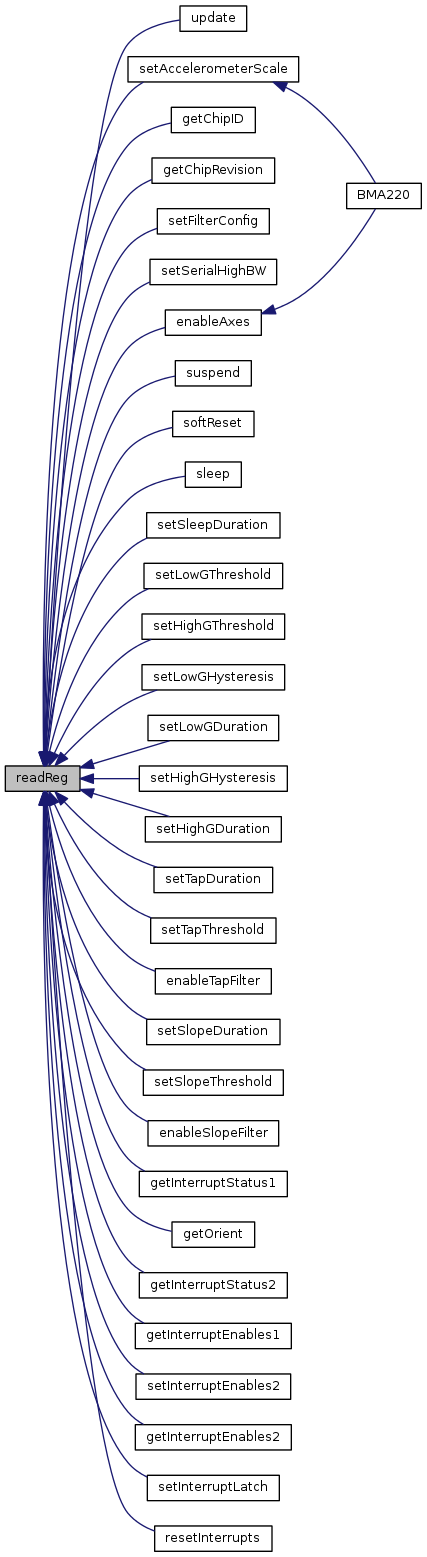
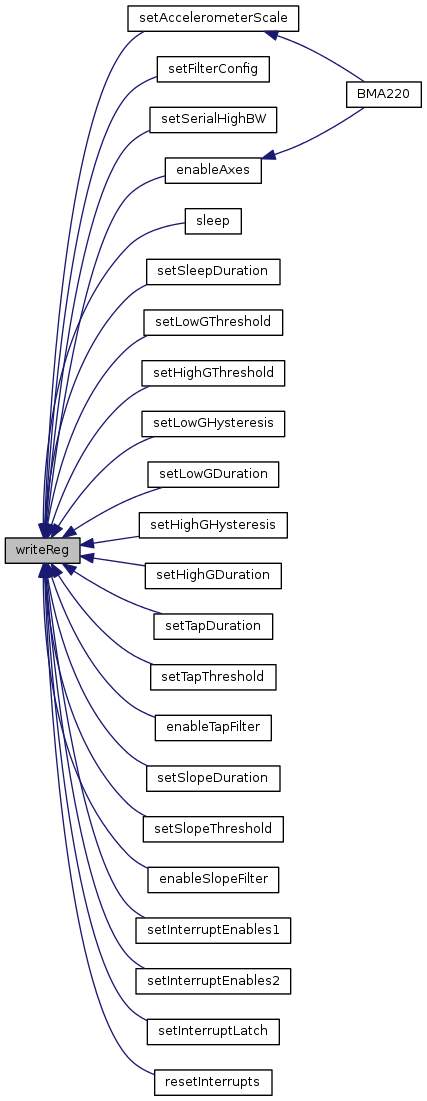
| BMA220 (int bus=BMA220_I2C_BUS, uint8_t addr=BMA220_DEFAULT_ADDR) | |
| ~BMA220 () | |
| void | update () |
| uint8_t | readReg (uint8_t reg) |
| bool | writeReg (uint8_t reg, uint8_t val) |
| uint8_t | getChipID () |
| uint8_t | getChipRevision () |
| bool | setAccelerometerScale (FSL_RANGE_T scale) |
| void | getAccelerometer (float *x, float *y, float *z) |
| std::vector< float > | getAccelerometer () |
| bool | setFilterConfig (FILTER_CONFIG_T filter) |
| bool | setSerialHighBW (bool high) |
| bool | enableAxes (bool xEn, bool yEn, bool zEn) |
| uint8_t | suspend () |
| uint8_t | softReset () |
| bool | sleep (bool enable) |
| bool | setSleepDuration (SLEEP_DUR_T dur) |
| bool | setLowGThreshold (uint8_t thresh) |
| bool | setHighGThreshold (uint8_t thresh) |
| bool | setLowGHysteresis (uint8_t hyst) |
| bool | setLowGDuration (uint8_t dur) |
| bool | setHighGHysteresis (uint8_t hyst) |
| bool | setHighGDuration (uint8_t dur) |
| bool | setTapDuration (uint8_t dur) |
| bool | setTapThreshold (uint8_t thresh) |
| bool | enableTapFilter (bool filt) |
| bool | setSlopeDuration (uint8_t dur) |
| bool | setSlopeThreshold (uint8_t thresh) |
| bool | enableSlopeFilter (bool filt) |
| uint8_t | getInterruptStatus1 () |
| CONFIG_ORIENT_T | getOrient () |
| uint8_t | getInterruptStatus2 () |
| bool | setInterruptEnables1 (uint8_t bits) |
| uint8_t | getInterruptEnables1 () |
| bool | setInterruptEnables2 (uint8_t bits) |
| uint8_t | getInterruptEnables2 () |
| bool | setInterruptLatch (CONFIG2_LAT_T lat) |
| bool | resetInterrupts () |
| void | installISR (int gpio, mraa::Edge level, void(*isr)(void *), void *arg) |
| void | uninstallISR () |
| mraa::Gpio * | get_gpioIntr () |
Protected Attributes | |
| mraa::I2c | m_i2c |
| mraa::Gpio * | m_gpioIntr |
| uint8_t | m_addr |
| float | m_accelX |
| float | m_accelY |
| float | m_accelZ |
| float | m_accelScale |
REG_H_HYST_DUR bits
| enum THRESHOLD_BITS_T |
REG_THRESHOLD bits
REG_L_HYST_DUR bits
| enum TAP_CONFIG_BITS_T |
REG_TAP_CONFIG bits
| enum SLOPE_CONFIG_BITS_T |
REG_SLOPE_CONFIG bits
| enum TAP_CONFIG2_BITS_T |
REG_TAP_CONFIG2 bits
| enum TAP_SAMP_T |
TAP_CONFIG2_SAMP values
| enum TAP_ORIENT_BLOCK_T |
TAP_CONFIG2_ORIENT_BLOCK values
| enum INT_STATUS1_BITS_T |
REG_INT_STATUS1 bits
| enum CONFIG_ORIENT_T |
INT_STATUS1_ORIENT values
These are values reported by the device if orientation detection is enabled.
| enum INT_STATUS2_BITS_T |
REG_INT_STATUS2 bits
| enum ENABLE_CONFIG_BITS_T |
REG_ENABLE_CONFIG bits
REG_ENABLE_CONFIG2 bits
| enum CONFIG2_LAT_T |
ENABLE_CONFIG2_LAT values
These are values that define the interrupt latching behavior
REG_ENABLE_CONFIG3 bits
| enum SLEEP_DUR_T |
ENABLE_CONFIG3_SLEEP_DUR values
These are values that define the length of time the device sleeps before sampling when in sleep mode.
| enum FILTER_CONFIG_BITS_T |
REG_FILTER_CONFIG bits
| enum FILTER_CONFIG_T |
FILTER_CONFIG_FILTER values
These are values that define the digital filtering frequency
REG_SBIST_FSL_CONFIG bits
| enum FSL_RANGE_T |
REG_SBIST_FSL_RANGE values
These are values that define the Full Scale configuration
| enum SBIST_T |
REG_SBIST_FSL_SBIST values
These are values that enable self test mode
| enum I2C_WATCHDOG_BITS_T |
REG_I2C_WATCHDOG bits
| BMA220 | ( | int | bus = BMA220_I2C_BUS, |
| uint8_t | addr = BMA220_DEFAULT_ADDR |
||
| ) |
BMA220 constructor
| bus | i2c bus to use |
| addr | the address for this device |
| void update | ( | void | ) |
update the accelerometer values

| uint8_t readReg | ( | uint8_t | reg | ) |
read a register
| reg | the register to read |
| bool writeReg | ( | uint8_t | reg, |
| uint8_t | val | ||
| ) |
write to a register
| reg | the register to write to |
| val | the value to write |
| uint8_t getChipID | ( | ) |
return the chip ID

| uint8_t getChipRevision | ( | ) |
return the chip revision

| bool setAccelerometerScale | ( | FSL_RANGE_T | scale | ) |
set the scaling mode of the accelerometer (2g/4g/8g/16g)
| scale | one of the FSL_RANGE_T values |

| void getAccelerometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
get the accelerometer values in gravities
| x | the returned x value, if arg is non-NULL |
| y | the returned y value, if arg is non-NULL |
| z | the returned z value, if arg is non-NULL |
| std::vector< float > getAccelerometer | ( | ) |
get the accelerometer values in gravities
| bool setFilterConfig | ( | FILTER_CONFIG_T | filter | ) |
set the filtering configuration
| filter | one of the FILTER_CONFIG_T values |
| bool setSerialHighBW | ( | bool | high | ) |
enable or disable high bandwidth serial access (1Khz). This essentially disables filtering and makes the raw unfiltered data available in the axis registers.
| high | true to enable high bw access, false otherwise |
| bool enableAxes | ( | bool | xEn, |
| bool | yEn, | ||
| bool | zEn | ||
| ) |
enable or disable axis channels
| xEn | true to enable the axis, false otherwise |
| yEn | true to enable the axis, false otherwise |
| zEn | true to enable the axis, false otherwise |

| uint8_t suspend | ( | ) |
place the device into, or take the device out of suspend mode

| uint8_t softReset | ( | ) |
place the device into, or take the device out of soft reset mode

| bool sleep | ( | bool | enable | ) |
place the device into, or take the device out of low power mode. See the datasheet for information on how low power mode is implemented on this device.
| enable | true to set low power mode, false otherwise |
| bool setSleepDuration | ( | SLEEP_DUR_T | dur | ) |
when in low power (sleep) mode, specify how often the device wakes up to acquire samples.
| dur | one of the SLEEP_DUR_T values |
| bool setLowGThreshold | ( | uint8_t | thresh | ) |
specify the threshold for low G detection
| thresh | see the datasheet |
| bool setHighGThreshold | ( | uint8_t | thresh | ) |
specify the threshold for high G detection
| thresh | see the datasheet |
| bool setLowGHysteresis | ( | uint8_t | hyst | ) |
specify the hysteresis for low G detection
| hyst | 2 bit hysteresis value |
| bool setLowGDuration | ( | uint8_t | dur | ) |
specify the sample duration for low G detection
| dur | the number of samples (depends on bandwidth) |
| bool setHighGHysteresis | ( | uint8_t | hyst | ) |
specify the hysteresis for high G detection
| hyst | 2 bit hysteresis value |
| bool setHighGDuration | ( | uint8_t | dur | ) |
specify the sample duration for high G detection
| dur | the number of samples (depends on bandwidth) |
| bool setTapDuration | ( | uint8_t | dur | ) |
specify the sample duration for tap detection
| dur | the number of samples (depends on bandwidth) |
| bool setTapThreshold | ( | uint8_t | thresh | ) |
specify the threshold for tap detection
| thresh | see the datasheet |
| bool enableTapFilter | ( | bool | filt | ) |
unable to disable tap filtering
| filt | true to enable, false otherwise |
| bool setSlopeDuration | ( | uint8_t | dur | ) |
specify the sample duration for slope detection
| dur | the number of samples (depends on bandwidth) |
| bool setSlopeThreshold | ( | uint8_t | thresh | ) |
specify the threshold for slope detection
| thresh | see the datasheet |
| bool enableSlopeFilter | ( | bool | filt | ) |
enable or disable slope filtering
| filt | true to enable filtering, false otherwise |
| uint8_t getInterruptStatus1 | ( | ) |
return a bitmask of the interrupt status 1 register

| BMA220::CONFIG_ORIENT_T getOrient | ( | ) |
return the orient value from the interrupt status 1 register

| uint8_t getInterruptStatus2 | ( | ) |
return a bitmask of the interrupt status 2 register

| bool setInterruptEnables1 | ( | uint8_t | bits | ) |
enable interrupts for events in interrupt config register 1
| bits | bitmask of ENABLE_CONFIG_BITS_T values |

| uint8_t getInterruptEnables1 | ( | ) |
return the enabled interrupts for events in interrupt config register 1

| bool setInterruptEnables2 | ( | uint8_t | bits | ) |
enable interrupts for events in interrupt config register 2
| bits | bitmask of ENABLE_CONFIG2_BITS_T values |
| uint8_t getInterruptEnables2 | ( | ) |
return the enabled interrupts for events in interrupt config register 2

| bool setInterruptLatch | ( | CONFIG2_LAT_T | lat | ) |
configure interrupt latching behavior
| lat | one of the CONFIG2_LAT_T values |
| bool resetInterrupts | ( | ) |
reset the interrupt controller. This should be called after any changes are made to interrupt configuration, or to reset interrupts if latched interrupts have been enabled and an interrupt has occurred..
| void installISR | ( | int | gpio, |
| mraa::Edge | level, | ||
| void(*)(void *) | isr, | ||
| void * | arg | ||
| ) |
install an interrupt handler.
| gpio | gpio pin to use as interrupt pin |
| level | the interrupt trigger level (one of mraa::Edge values). Make sure that you have configured the interrupt pin properly for whatever level you choose. |
| isr | the interrupt handler, accepting a void * argument |
| arg | the argument to pass the the interrupt handler |

| void uninstallISR | ( | ) |
uninstall a previously installed interrupt handler
 1.8.11
1.8.11


