This module implements support for the Veris E50H2 and E50H5 BACnet Energy Meters.
From the datasheet: The E50H5 BACnet MS/TP DIN Rail Meter with Data Logging combines exceptional performance and easy installation to deliver a cost-effective solution for power monitoring applications. Native serial communication via BACnet MS/TP provides complete accessibility of all measurements to your Building Automation System The data logging capability protects data in the event of a power failure. The E50H5 can be easily installed on standard DIN rail, surface mounted or contained in an optional NEMA 4 enclosure, as needed. The front-panel LCD display makes device installation and setup easy and provides local access to the full set of detailed measurements.
This module was developed using the upm::BACNETMSTP module, based on libbacnet-stack 0.8.3. Both libbacnet 0.8.3 and the upm::BACNETMSTP libraries must be present in order to build this module. This driver was developed on the E50H5. The Trend Log functionality is not currently supported.
The Binary Input Objects are also not supported as these are only used for the Alarm bits which are already available from Analog Input Object 52 as an alarm bitfield incorporating all of the supported alarm indicators.
It was connected using an RS232->RS485 interface. You cannot use the built in MCU TTL UART pins for accessing this device – you must use a full Serial RS232->RS485 or USB-RS485 interface connected via USB.
string defaultDev = "/dev/ttyUSB0";
if (argc > 1)
defaultDev = string(argv[1]);
cout << "Using device " << defaultDev << endl;
cout << "Initializing..." << endl;
sensor.initMaster(defaultDev, 38400, 1000001, 2);
cout << endl;
cout << "Device Description: " << sensor.getDeviceDescription() << endl;
cout << "Device Location: " << sensor.getDeviceLocation() << endl;
cout << endl;
while (shouldRun) {
cout << "System Voltage: " << sensor.getAnalogValue(E50HX::AV_System_Voltage) << " "
<< sensor.getAnalogValueUnits(E50HX::AV_System_Voltage) << endl;
cout << "System Type: " << sensor.getAnalogValue(E50HX::AV_System_Type) << endl;
cout << "Energy Consumption: " << sensor.getAnalogInput(E50HX::AI_Energy) << " "
<< sensor.getAnalogInputUnits(E50HX::AI_Energy) << endl;
cout << "Power Up Counter: " << sensor.getAnalogInput(E50HX::AI_Power_Up_Count) << endl;
cout << endl;
upm_delay(5);
}
cout << "Exiting..." << endl;
|
| enum | ANALOG_VALUES_T : uint32_t {
AV_Config = 1,
AV_System_Type = 2,
AV_CT_Ratio_Primary = 3,
AV_CT_Ratio_Secondary = 4,
AV_PT_Ratio = 5,
AV_System_Voltage = 6,
AV_Display_Units = 7,
AV_Phase_Loss_Voltage_Threshold = 8,
AV_Phase_Loss_Imbalance_Threshold = 9,
AV_Subintervals = 10,
AV_Subinterval_Length = 11
} |
| |
| enum | ANALOG_INPUTS_T : uint32_t {
AI_Energy = 1,
AI_kW_Total = 2,
AI_kVAR_Total = 3,
AI_kVA_Total = 4,
AI_PF_Total = 5,
AI_Volts_LL_Avg = 6,
AI_Volts_LN_Avg = 7,
AI_Current_Avg = 8,
AI_kW_A = 9,
AI_kW_B = 10,
AI_kW_C = 11,
AI_PF_A = 12,
AI_PF_B = 13,
AI_PF_C = 14,
AI_Volts_AB = 15,
AI_Volts_BC = 16,
AI_Volts_AC = 17,
AI_Volts_AN = 18,
AI_Volts_BN = 19,
AI_Volts_CN = 20,
AI_Current_A = 21,
AI_Current_B = 22,
AI_Current_C = 23,
AI_Frequency = 25,
AI_kVAh = 26,
AI_kVARh = 27,
AI_kVA_A = 28,
AI_kVA_B = 29,
AI_kVA_C = 30,
AI_kVAR_A = 31,
AI_kVAR_B = 32,
AI_kVAR_C = 33,
AI_KW_Present_Demand = 34,
AI_KVAR_Present_Demand = 35,
AI_KWA_Present_Demand = 36,
AI_KW_Max_Demand = 37,
AI_KVAR_Max_Demand = 38,
AI_KVA_Max_Demand = 39,
AI_Pulse_Count_1 = 40,
AI_Pulse_Count_2 = 41,
AI_KWH_A = 42,
AI_KWH_B = 43,
AI_KWH_C = 44,
AI_Max_Power = 45,
AI_Energy_Resets = 47,
AI_Power_Up_Count = 50,
AI_Output_Config = 51,
AI_Alarm_Bitmap = 52
} |
| |
| enum | ALARM_BITS_T : uint16_t {
ALARM_Volts_Error_A = 0x0001,
ALARM_Volts_Error_B = 0x0002,
ALARM_Volts_Error_C = 0x0004,
ALARM_Current_Error_A = 0x0008,
ALARM_Current_Error_B = 0x0010,
ALARM_Current_Error_C = 0x0020,
ALARM_Frequency_Error = 0x0040,
ALARM_Reserved_0 = 0x0080,
ALARM_Phase_Loss_A = 0x0100,
ALARM_Phase_Loss_B = 0x0200,
ALARM_Phase_Loss_C = 0x0400,
ALARM_Power_Factor_A = 0x0800,
ALARM_Power_Factor_B = 0x1000,
ALARM_Power_Factor_C = 0x2000,
ALARM_RTC_RESET = 0x4000
} |
| |
| enum | CFG_VALUES_T { CFG_CLR_ENERGY_ACCUM = 30078,
CFG_NEW_DSI = 21211,
CFG_RESET_MAX_TO_PRESENT = 21212,
CFG_CLEAR_PULSE_COUNTERS = 16498
} |
| |
| enum | SYSTEM_TYPES_T {
SYSTYPE_SINGLE_PHASE_AN = 10,
SYSTYPE_SINGLE_PHASE_AB = 11,
SYSTYPE_SPLIT_PHASE_ABN = 12,
SYSTYPE_3PHASE_ABC = 31,
SYSTYPE_3PHASE_ABCN = 40
} |
| |
| enum | CT_SECONDARY_T { CT_RATIO_SECONDARY_1 = 1,
CT_RATIO_SECONDARY_3 = 3
} |
| |
| enum | DISP_UNITS_T { DISP_UNITS_IEC = 0,
DISP_UNITS_IEEE = 1
} |
| |
|
| | E50HX (uint32_t targetDeviceObjectID) |
| |
| | ~E50HX () |
| |
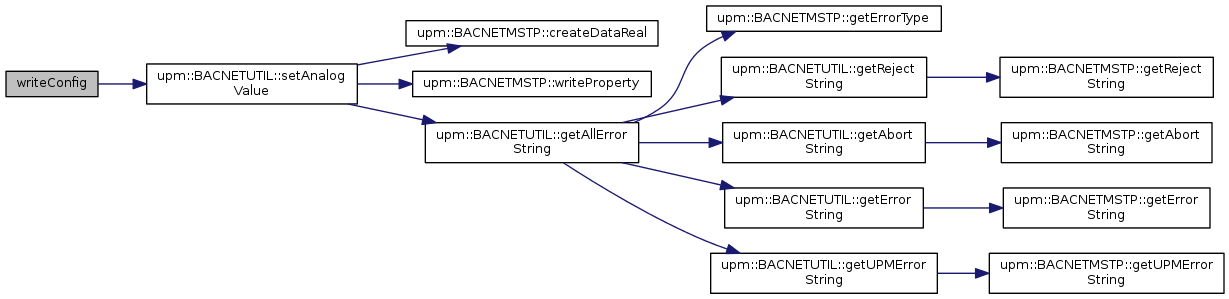
| void | writeConfig (CFG_VALUES_T config) |
| |
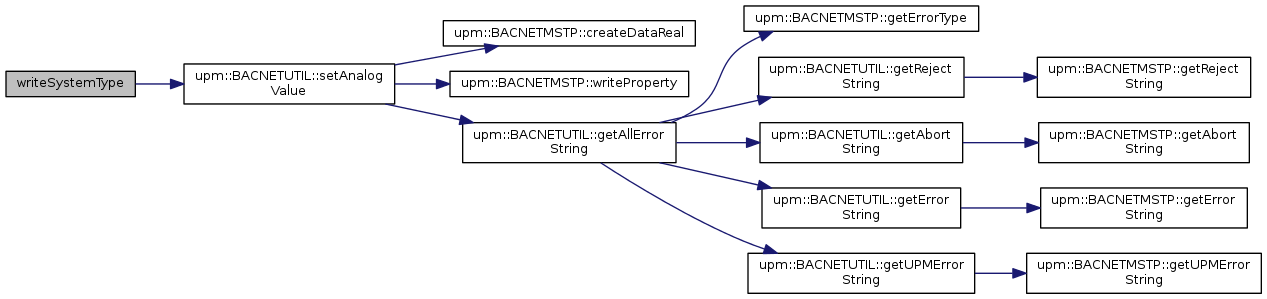
| void | writeSystemType (SYSTEM_TYPES_T systype) |
| |
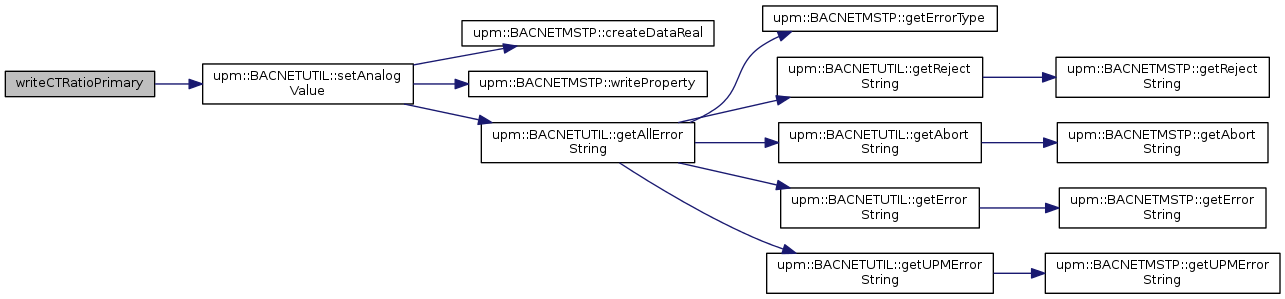
| void | writeCTRatioPrimary (float ctRatio) |
| |
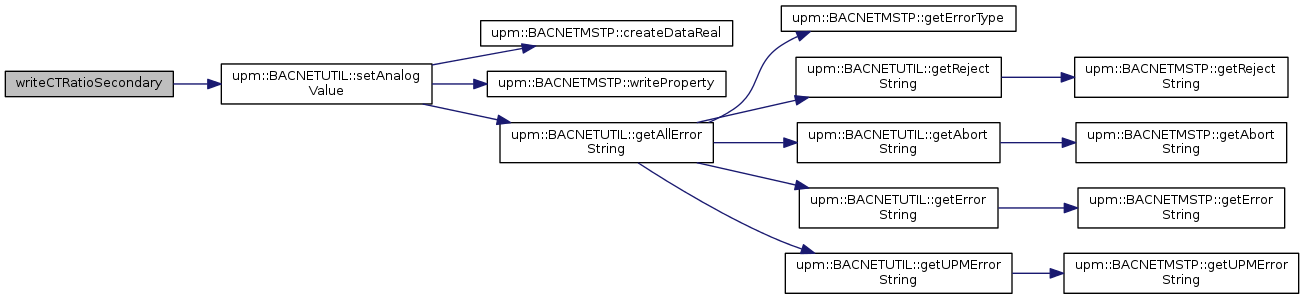
| void | writeCTRatioSecondary (CT_SECONDARY_T ctRatio) |
| |
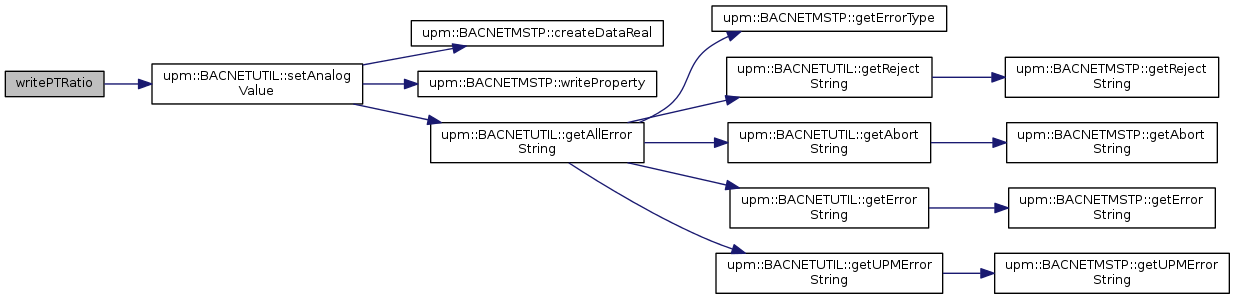
| void | writePTRatio (float ptRatio) |
| |
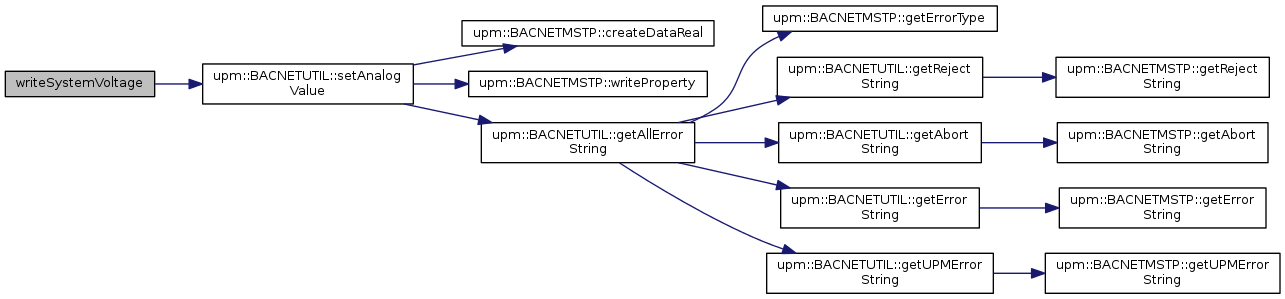
| void | writeSystemVoltage (float sysVolts) |
| |
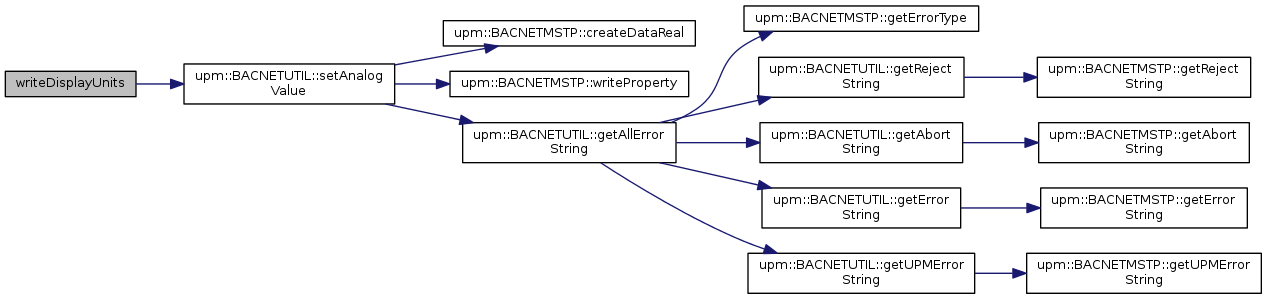
| void | writeDisplayUnits (DISP_UNITS_T dispUnits) |
| |
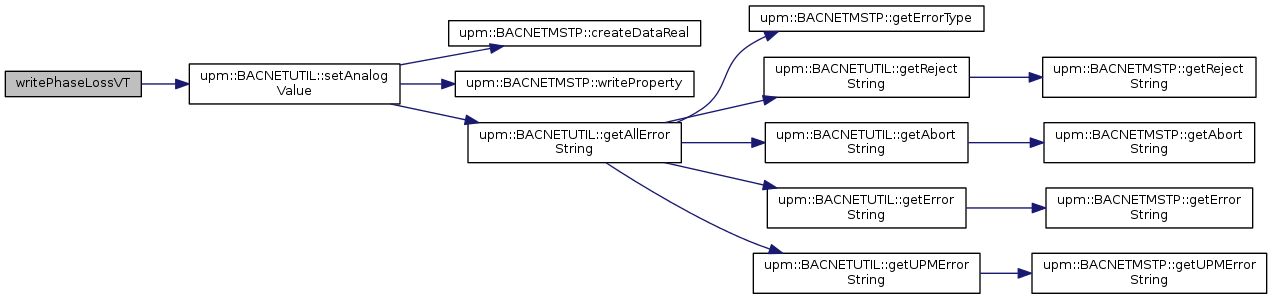
| void | writePhaseLossVT (float phaseLoss) |
| |
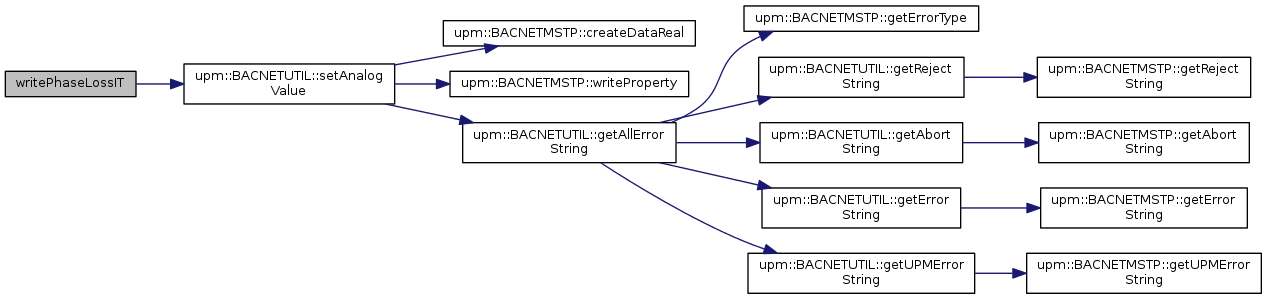
| void | writePhaseLossIT (float phaseLoss) |
| |
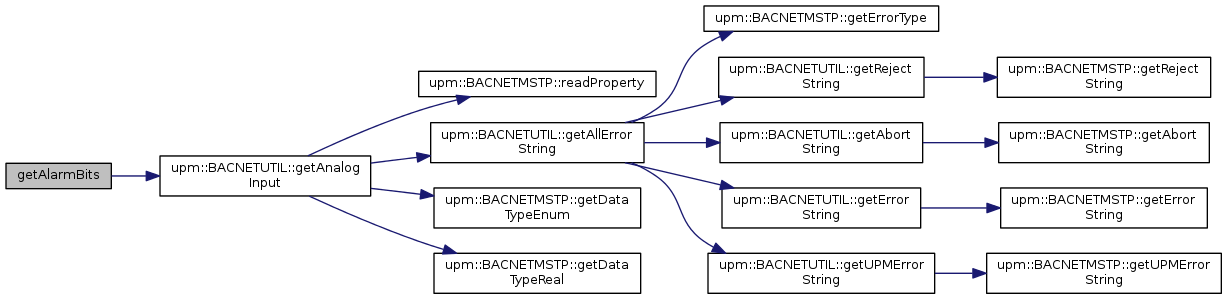
| uint16_t | getAlarmBits () |
| |
| | BACNETUTIL (uint32_t targetDeviceObjectID) |
| |
| virtual | ~BACNETUTIL () |
| |
| virtual void | initMaster (std::string port, int baudRate, int deviceInstanceNumber, int macAddr, int maxMaster=DEFAULT_MAX_MASTER, int maxInfoFrames=1) |
| |
| virtual void | setDebug (bool enable) |
| |
| virtual float | getAnalogValue (uint32_t objInstance) |
| |
| virtual void | setAnalogValue (uint32_t objInstance, float value) |
| |
| virtual float | getAnalogInput (uint32_t objInstance) |
| |
| virtual std::string | getAnalogValueUnits (uint32_t objInstance) |
| |
| virtual std::string | getAnalogInputUnits (uint32_t objInstance) |
| |
| virtual bool | getBinaryInput (uint32_t objInstance) |
| |
| virtual std::string | lookupBinaryInputText (uint32_t objInstance, bool value) |
| |
| virtual std::string | getBinaryInputText (uint32_t objInstance) |
| |
| virtual bool | getBinaryValue (uint32_t objInstance) |
| |
| virtual void | setBinaryValue (uint32_t objInstance, bool value) |
| |
| virtual std::string | lookupBinaryValueText (uint32_t objInstance, bool value) |
| |
| virtual std::string | getBinaryValueText (uint32_t objInstance) |
| |
| virtual unsigned int | getMultiStateValue (uint32_t objInstance) |
| |
| virtual std::string | lookupMultiStateValueText (uint32_t objInstance, unsigned int value) |
| |
| virtual std::string | getMultiStateValueText (uint32_t objInstance) |
| |
| virtual unsigned int | getMultiStateValueMaxStates (uint32_t objInstance) |
| |
| virtual void | setMultiStateValue (uint32_t objInstance, unsigned int value) |
| |
| virtual void | checkReliability (bool enable) |
| |
| virtual std::string | getDeviceDescription () |
| |
| virtual std::string | getDeviceLocation () |
| |
| virtual bool | setDeviceLocation (std::string location) |
| |
| virtual std::string | getDeviceName () |
| |
| virtual bool | setDeviceName (std::string name) |
| |
| virtual std::string | getAllErrorString () |
| |
| virtual BACNETMSTP::BACERR_TYPE_T | getErrorType () |
| |
| virtual uint8_t | getRejectReason () |
| |
| virtual std::string | getRejectString () |
| |
| virtual uint8_t | getAbortReason () |
| |
| virtual std::string | getAbortString () |
| |
| virtual BACNET_ERROR_CLASS | getErrorClass () |
| |
| virtual BACNET_ERROR_CODE | getErrorCode () |
| |
| virtual std::string | getErrorString () |
| |
| virtual std::string | getUPMErrorString () |
| |
 Public Member Functions inherited from BACNETUTIL
Public Member Functions inherited from BACNETUTIL
 1.8.11
1.8.11

