|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
API for the LSM303AGR 3-Axis Geomagnetic Sensor. More...
The LSM303AGR is an ultra-low-power high-performance system-in-package featuring a 3D digital linear acceleration sensor and a 3D digital magnetic sensor. The LSM303AGR has linear acceleration full scales of 2g/4g/8g/16g and a magnetic field dynamic range of 50 Gauss.
Not all functionality of this chip has been implemented in this driver, however all the pieces are present to add any desired functionality. This driver supports only I2C operation.
This device requires 3.3v operation.
Public Member Functions | |
| LSM303AGR (int bus=LSM303AGR_DEFAULT_I2C_BUS, int acc_addr=LSM303AGR_DEFAULT_ACC_ADDR, int mag_addr=LSM303AGR_DEFAULT_MAG_ADDR) | |
| ~LSM303AGR () | |
| void | update () |
| void | getMagnetometer (float *x, float *y, float *z) |
| std::vector< float > | getMagnetometer () |
| void | getAccelerometer (float *x, float *y, float *z) |
| std::vector< float > | getAccelerometer () |
| float | getTemperature () |
| void | init (LSM303AGR_POWER_MODE_T usage=LSM303AGR_POWER_HIGH_RESOLUTION) |
| void | setFullScale (LSM303AGR_A_FS_T fs) |
| void | setPowerMode (LSM303AGR_POWER_MODE_T mode) |
| void | setAccelerometerODR (LSM303AGR_A_ODR_T odr) |
| void | setMagnetometerODR (LSM303AGR_CFG_A_M_ODR_T odr) |
| uint8_t | getAccelerometerInt1Config () |
| uint8_t | getAccelerometerInt2Config () |
| void | setAccelerometerInt1Config (uint8_t bits) |
| void | setAccelerometerInt2Config (uint8_t bits) |
| uint8_t | getMagnetometerIntConfig () |
| void | setMagnetometerIntConfig (uint8_t bits) |
| uint8_t | getAccelerometerInt1Src () |
| uint8_t | getAccelerometerInt2Src () |
| uint8_t | getMagnetometerIntSrc () |
| void | installISR (LSM303AGR_INTERRUPT_PINS_T intr, int gpio, mraa::Edge level, void(*isr)(void *), void *arg) |
| void | uninstallISR (LSM303AGR_INTERRUPT_PINS_T intr) |
Protected Member Functions | |
| uint8_t | readReg (uint8_t reg) |
| int | readRegs (uint8_t reg, uint8_t *buffer, int len) |
| void | writeReg (uint8_t reg, uint8_t val) |
Protected Attributes | |
| lsm303agr_context | m_lsm303agr |
| LSM303AGR | ( | int | bus = LSM303AGR_DEFAULT_I2C_BUS, |
| int | acc_addr = LSM303AGR_DEFAULT_ACC_ADDR, |
||
| int | mag_addr = LSM303AGR_DEFAULT_MAG_ADDR |
||
| ) |
LSM303AGR constructor
This driver can only support I2C. SPI requires support for 3-wire SPI which we cannot currently handle. Only the basic capabilities of the device are supported, however there is a full register map defined (lsm303agr_defs.h), and with access to the bus read/write functions, any desired additional functionality can be implemented.
| bus | I2C bus to use |
| acc_addr | The I2C address of the accelerometer. Use -1 if you do not wish to use the accelerometer. |
| mag_addr | The I2C address of the magnetometer. Use -1 if you do not wish to use the magnetometer. |
| std::runtime_error | on failure. |
| void update | ( | void | ) |
Update the internal stored values from sensor data. This method must be called before querying the acceleration, magnetometer, or temperature.
| std::runtime_error | on failure |

| void getMagnetometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
Return magnetometer data in micro-Teslas (uT). update() must have been called prior to calling this method.
| x | Pointer to a floating point value that will have the current x component placed into it |
| y | Pointer to a floating point value that will have the current y component placed into it |
| z | Pointer to a floating point value that will have the current z component placed into it |

| std::vector< float > getMagnetometer | ( | ) |
Return magnetometer data in micro-Teslas (uT) in the form of a floating point vector. update() must have been called prior to calling this method.
| void getAccelerometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
Return acceleration data in gravities. update() must have been called prior to calling this method.
| x | Pointer to a floating point value that will have the current x component placed into it |
| y | Pointer to a floating point value that will have the current y component placed into it |
| z | Pointer to a floating point value that will have the current z component placed into it |

| std::vector< float > getAccelerometer | ( | ) |
Return acceleration data in gravities in the form of a floating point vector. update() must have been called prior to calling this method.
| float getTemperature | ( | void | ) |
Return temperature data in degrees Celsius. NOTE: This is not the ambient room temperature. update() must have been called prior to calling this method.

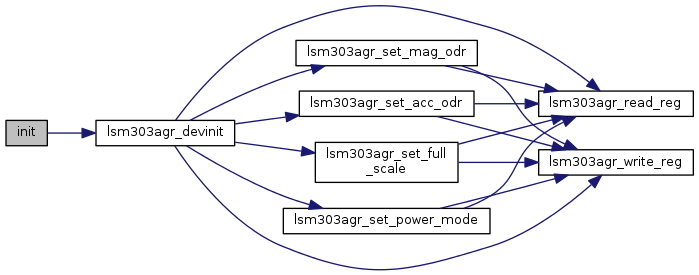
| void init | ( | LSM303AGR_POWER_MODE_T | usage = LSM303AGR_POWER_HIGH_RESOLUTION | ) |
Initialize the device and start operation. This function is called from the constructor so it will not typically need to be called by a user unless the device is reset. It will initialize the accelerometer and magnetometer (if enabled) to certain default running modes.
For the accelerometer, the full scale will be set to 2G, mode continuous, all axes enabled, BDU enabled, temperature measurement enabled, and an output data rate (ODR) of 100Hz with the power mode set at high resolution.
For the magnetometer, temperature compensation will be enabled, mode continuous, and an output data rate of 10Hz with the power mode set at high resolution.
| usage | One of the LSM303AGR_POWER_MODE_T values. The default is LSM303AGR_POWER_HIGH_RESOLUTION. |
| std::runtime_error | on failure |
| void setFullScale | ( | LSM303AGR_A_FS_T | fs | ) |
Set the full scale (sensitivity) value for the accelerometer. This device supports 2G, 4G, 8G, and 16G full scale modes.
| fs | One of the LSM303AGR_A_FS_T values |
| std::runtime_error | on failure |

| void setPowerMode | ( | LSM303AGR_POWER_MODE_T | mode | ) |
Set an operating power mode. There are 3 modes available: low power, normal, and high resolution.
| mode | One of the LSM303AGR_POWER_MODE_T values. The default set at initialization time is LSM303AGR_POWER_HIGH_RESOLUTION. |
| std::runtime_error | on failure |

| void setAccelerometerODR | ( | LSM303AGR_A_ODR_T | odr | ) |
Set the accelerometer output data rate (ODR)
| odr | One of the LSM303AGR_A_ODR_T values. The default set at initialization time is LSM303AGR_A_ODR_100HZ. |
| std::runtime_error | on failure |

| void setMagnetometerODR | ( | LSM303AGR_CFG_A_M_ODR_T | odr | ) |
Set the magnetometer output data rate (ODR)
| odr | One of the LSM303AGR_CFG_A_M_ODR_T values. The default set at initialization time is LSM303AGR_CFG_A_M_ODR_10HZ. |
| std::runtime_error | on failure |

| uint8_t getAccelerometerInt1Config | ( | ) |
Return the accelerometer interrupt 1 config register. This register allows you to enable various interrupt conditions. See the datasheet for details.

| uint8_t getAccelerometerInt2Config | ( | ) |
Return the accelerometer interrupt 2 config register. This register allows you to enable various interrupt conditions. See the datasheet for details.

| void setAccelerometerInt1Config | ( | uint8_t | bits | ) |
Set the accelerometer interrupt 1 config register. See the datasheet for details.
| dev | The device context |
| bits | A bitmask of LSM303AGR_INT_CFG_A_BITS_T bits |
| std::runtime_error | on failure |

| void setAccelerometerInt2Config | ( | uint8_t | bits | ) |
Set the accelerometer interrupt 2 config register. See the datasheet for details.
| dev | The device context |
| bits | A bitmask of LSM303AGR_INT_CFG_A_BITS_T bits |
| std::runtime_error | on failure |

| uint8_t getMagnetometerIntConfig | ( | ) |
Return the magnetometer interrupt config register. See the datasheet for details.

| void setMagnetometerIntConfig | ( | uint8_t | bits | ) |
Set the magnetometer (mag) interrupt config register. See the datasheet for details.
| bits | A bitmask of LSM303AGR_INT_CTRL_REG_M_BITS_T bits |
| std::runtime_error | on failure |

| uint8_t getAccelerometerInt1Src | ( | ) |
Return the accelerometer interrupt 1 source register. This register indicates which interrupts have been triggered. See the datasheet for details.

| uint8_t getAccelerometerInt2Src | ( | ) |
Return the accelerometer interrupt 2 source register. This register indicates which interrupts have been triggered. See the datasheet for details.

| uint8_t getMagnetometerIntSrc | ( | ) |
Return the magnetometer (mag) interrupt source register. This register indicates which interrupts have been triggered. See the datasheet for details.
| dev | The device context |

| void installISR | ( | LSM303AGR_INTERRUPT_PINS_T | intr, |
| int | gpio, | ||
| mraa::Edge | level, | ||
| void(*)(void *) | isr, | ||
| void * | arg | ||
| ) |
Install an interrupt handler
| intr | One of the LSM303AGR_INTERRUPT_PINS_T values specifying which interrupt pin you are installing |
| gpio | GPIO pin to use as interrupt pin |
| level | The interrupt trigger level (one of mraa::Edge values). Make sure that you have configured the interrupt pin properly for whatever level you choose. |
| isr | The interrupt handler, accepting a void * argument |
| arg | The argument to pass the the interrupt handler |
| std::runtime_error | on failure |

| void uninstallISR | ( | LSM303AGR_INTERRUPT_PINS_T | intr | ) |
Uninstall a previously installed interrupt handler
| intr | One of the LSM303AGR_INTERRUPT_PINS_T values specifying which interrupt pin you are removing |

|
protected |
Read a register
| reg | The register to read |

|
protected |
Read contiguous registers into a buffer
| buffer | The buffer to store the results |
| len | The number of registers to read |
| std::runtime_error | on failure |

|
protected |
Write to a register
| reg | The register to write to |
| val | The value to write |
| std::runtime_error | on failure |

 1.8.11
1.8.11


