|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
API for the Microchip RN2903 LoRa radio. More...
The Microchip RN2903 Low-Power Long Range LoRa Technology Transceiver module provides an easy to use, low-power solution for long range wireless data transmission. The advanced command interface offers rapid time to market.
The RN2903 module complies with the LoRaWAN Class A protocol specifications. It integrates RF, a baseband controller, and a command Application Programming Interface (API) processor, making it a complete long range solution.
Most of the effort in this driver has been geared to supporting operation within a LoRaWAN network, however methods are provided to allow you to control the device directly so that you can implement whatever solution you require.
Public Member Functions | |
| RN2903 (unsigned int uart, unsigned int baudrate=RN2903_DEFAULT_BAUDRATE) | |
| RN2903 (std::string uart_path, unsigned int baudrate=RN2903_DEFAULT_BAUDRATE) | |
| virtual | ~RN2903 () |
| void | setResponseWaitTime (unsigned int wait_ms=RN2903_DEFAULT_RESP_DELAY) |
| void | setResponse2WaitTime (unsigned int wait_ms=RN2903_DEFAULT_RESP2_DELAY) |
| bool | dataAvailable (unsigned int millis) |
| void | drain () |
| RN2903_RESPONSE_T | command (const std::string cmd) |
| RN2903_RESPONSE_T | commandWithArg (const std::string cmd, const std::string arg) |
| RN2903_RESPONSE_T | waitForResponse (int wait_ms) |
| std::string | getResponse () |
| int | getResponseLen () |
| void | setDeviceEUI (const std::string str) |
| void | getDeviceEUI () |
| void | setDeviceAddr (std::string str) |
| void | getDeviceAddr () |
| void | setNetworkSessionKey (std::string str) |
| void | setApplicationSessionKey (std::string str) |
| void | setApplicationEUI (const std::string str) |
| void | getApplicationEUI () |
| void | setApplicationKey (const std::string str) |
| void | getApplicationKey () |
| std::string | toHex (const std::string src) |
| std::string | fromHex (const std::string src) |
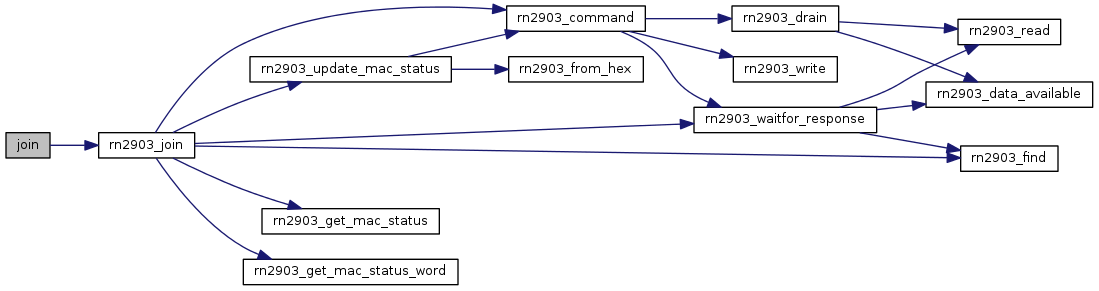
| RN2903_JOIN_STATUS_T | join (RN2903_JOIN_TYPE_T type) |
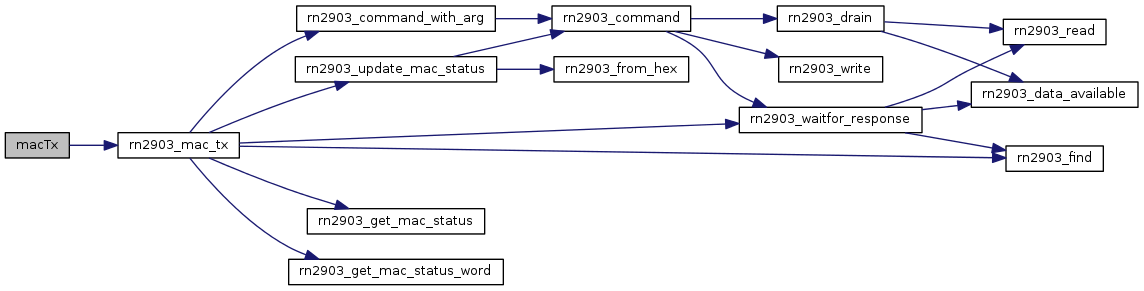
| RN2903_MAC_TX_STATUS_T | macTx (RN2903_MAC_MSG_TYPE_T type, int port, std::string payload) |
| RN2903_RESPONSE_T | radioTx (const std::string payload) |
| RN2903_RESPONSE_T | radioRx (int window_size) |
| std::string | getHardwareEUI () |
| void | updateMacStatus () |
| int | getMacStatusWord () |
| RN2903_MAC_STATUS_T | getMacStatus () |
| void | macSave () |
| void | macPause () |
| void | macResume () |
| void | reset () |
| void | macSetBattery (int level) |
| void | setDebug (bool enable) |
| void | setBaudrate (unsigned int baudrate) |
| void | setFlowControl (RN2903_FLOW_CONTROL_T fc) |
| bool | find (const std::string str) |
| std::string | getRadioRxPayload () |
| bool | autobaud (int retries) |
Protected Member Functions | |
| std::string | read (int size) |
| int | write (std::string buffer) |
Protected Attributes | |
| rn2903_context | m_rn2903 |
| RN2903 | ( | unsigned int | uart, |
| unsigned int | baudrate = RN2903_DEFAULT_BAUDRATE |
||
| ) |
RN2903 object constructor for a UART specified by MRAA number.
| uart | Specify which uart to use. |
| baudrate | Specify the baudrate to use. The default is 57600. |

| RN2903 | ( | std::string | uart_path, |
| unsigned int | baudrate = RN2903_DEFAULT_BAUDRATE |
||
| ) |
RN2903 object constructor for a UART specified by PATH (ex: /dev/ttyUSB0)
| uart_path | Specify path of UART device. |
| baudrate | Specify the baudrate to use. The default is 57600. |
| void setResponseWaitTime | ( | unsigned int | wait_ms = RN2903_DEFAULT_RESP_DELAY | ) |
Set the default time, in milliseconds, to wait for a response after sending a command. All commands return at least one response immediately after issuing the command. This delay sets the maximum amount of time to wait for it.
| wait_ms | The response delay to set, in milliseconds. The default is 1 second (1000ms). |

| void setResponse2WaitTime | ( | unsigned int | wait_ms = RN2903_DEFAULT_RESP2_DELAY | ) |
Set the default time, in milliseconds, to wait for the second response data to arrive. Some commands will have a second response emitted after the first response. This delay sets the maximum amount of time to wait for it.
| wait_ms | The response delay to set, in milliseconds. The default is 60 seconds (60000ms). |

| bool dataAvailable | ( | unsigned int | millis | ) |
Determine whether there is data available to be read. This function will wait up to "millis" milliseconds for data to become available.
| millis | The number of milliseconds to wait for data to become available. |

| void drain | ( | ) |
Read and throw away any data currently available to be read. This is useful to avoid reading data that might have been the result of a previous command interfering with data you currently want to read.
| RN2903_RESPONSE_T command | ( | const std::string | cmd | ) |
Send a command, wait for a response using waitForResponse(), and return the status. The response itself will be stored internally, and can be retrieved using getResponse() and getResponseLen(). Every command will return at least one response, and this function will always wait for it and store it into the internal response buffer after sending the command.
| cmd | A character string containing the command to send |

| RN2903_RESPONSE_T commandWithArg | ( | const std::string | cmd, |
| const std::string | arg | ||
| ) |
Build a command string with the supplied command and string argument. Then call command() with the result, and return the result. This is just a convenience function.
| cmd | A character string containing the command to send |
| arg | A string argument for the command |

| RN2903_RESPONSE_T waitForResponse | ( | int | wait_ms | ) |
Wait up to wait_ms milliseconds for a response.
In the case of errors ("invalid_param" received, timeout occurred, or other UPM specific error), this will be indicated by the return value.
Otherwise, an "ok" or other data value will not be considered an error and will return RN2903_RESPONSE_OK. The response itself will be stored internally, and can be retrieved using getResponse() and getResponseLen().
NOTE: the response buffer is overwritten whenever this function is called, so if there is data in there that you need to save, copy it somewhere else before calling any other methods in this driver to be safe.
| wait_ms | The maximum number of milliseconds to wait for a response. |
| std::string getResponse | ( | ) |
Return a string containing a copy of the last response saved in the response buffer
| int getResponseLen | ( | ) |
Return the length in bytes of the string containing the last response.

| void setDeviceEUI | ( | const std::string | str | ) |
Set the MAC device EUI for LoRaWAN communications. The device EUI must be a hex encoded string of 16 bytes. This value must be set for LoRaWAN OTAA joining.
| str | The 16-byte hex encoded device EUI |
| std::runtime_error | if the EUI is invalid or the mac set command failed |

| void getDeviceEUI | ( | ) |
Retrieve the device EUI from the device. If this function succeeds, you can then use getResponse() to get the value.
| std::runtime_error | if the mac get command failed |

| void setDeviceAddr | ( | std::string | str | ) |
Set the MAC device address for LoRaWAN communications. The device address must be a hex encoded string of 8 bytes. This value must be set for LoRaWAN ABP joining.
For OTAA joining, this value will be overwritten once the join has completed, and therefore must not be set if performing an OTAA join.
| str | The 8-byte hex encoded device address |
| std::runtime_error | if the mac set command failed or the hex string is invalid |

| void getDeviceAddr | ( | ) |
Retrieve the device address from the device. If this function succeeds, you can then use getResponse() to get the value.
| std::runtime_error | if the mac get failed |

| void setNetworkSessionKey | ( | std::string | str | ) |
Set the MAC network session key for LoRaWAN communications. The network session key must be a hex encoded string of 32 bytes. This value must be set for LoRaWAN ABP joining. It it not possible to retrieve this key.
For OTAA joining, this value will be overwritten once the join has completed, and therefore must not be set if performing an OTAA join.
| str | The 32-byte hex encoded network session key |
| std::runtime_error | if the mac set command failed or the hex string is invalid |

| void setApplicationSessionKey | ( | std::string | str | ) |
Set the MAC application session key for LoRaWAN communications. The application session key must be a hex encoded string of 32 bytes. This value must be set for LoRaWAN ABP joining. It it not possible to retrieve this key.
For OTAA joining, this value will be overwritten once the join has completed, and therefore must not be set if performing an OTAA join.
| str | The 32-byte hex encoded application session key |
| std::runtime_error | if the mac set command failed or the hex string is invalid |

| void setApplicationEUI | ( | const std::string | str | ) |
Set the MAC application EUI for LoRaWAN communications. The application EUI must be a hex encoded string of 16 bytes. This value must be set for LoRaWAN OTAA joining.
| str | The 16-byte hex encoded application EUI |
| std::runtime_error | if the EUI is invalid, or if the mac set command failed |

| void getApplicationEUI | ( | ) |
Retrieve the application EUI from the device. If this function succeeds, you can then use getResponse() to get the value.
| std::runtime_error | if the mac get command failed |

| void setApplicationKey | ( | const std::string | str | ) |
Set the MAC application key for LoRaWAN communications. The application key must be a hex encoded string of 32 bytes. This value must be set for LoRaWAN OTAA joining.
| str | The 32-byte hex encoded application key |
| std::runtime_error | if the key is invalid, or if the mac set command failed |

| void getApplicationKey | ( | ) |
Retrieve the application key from the device. If this function succeeds, you can then use rn2903_get_response() to get the value.
| std::runtime_error | if the mac get command failed |

| std::string toHex | ( | const std::string | src | ) |
Convert src into a hex byte string. All non-command related data such as keys, and payload sent to the device must be hex encoded.
| src | A string to encode |

| std::string fromHex | ( | const std::string | src | ) |
Decode a hex byte string into the original string. The hex string must have a length that is a multiple of two, and all characters in the string must be valid hex characters.

| RN2903_JOIN_STATUS_T join | ( | RN2903_JOIN_TYPE_T | type | ) |
Join a LoRaWAN network. There are two types of joins possible - Over The Air Activation (OTAA) and Activation by Personalization (ABP). Each join method requires that certain items have been configured first.
For OTAA activation, the Device Extended Unique Identifier (EUI), the Application EUI, and Application Key must be set.
For ABP activation, The Device Address, Network Session Key, and the Application Session Key must be set.
| type | The LoRaWAN join activation type, one of the RN2903_JOIN_TYPE_T values |
| RN2903_MAC_TX_STATUS_T macTx | ( | RN2903_MAC_MSG_TYPE_T | type, |
| int | port, | ||
| std::string | payload | ||
| ) |
Transmit a packet in a LoRaWAN network. You must already be joined to a LoRaWAN network for this command to succeed, and the MAC stack must be in the idle (RN2903_MAC_STAT_IDLE) state.
The packet payload must be a valid hex encoded string.
There is the possibility of receiving a downlink message after transmitting a packet. If this occurs, this function will return RN2903_MAC_TX_STATUS_RX_RECEIVED, and the returned data will be stored in the response buffer.
| type | The type of message to send - confirmed or unconfirmed. One of the RN2903_MAC_MSG_TYPE_T values. |
| port | An integer in the range 1-223 |
| payload | A valid hex encoded string that makes up the payload of the message |
| RN2903_RESPONSE_T radioTx | ( | const std::string | payload | ) |
Transmit a packet. This method uses the radio directly without the LoRaWAN stack running. For this reason, you must call macPause() before trying to transmit using this function. You should also configure any radio parameters (frequency, etc), before calling this function.
| payload | A valid hex encoded string that makes up the payload of the message |

| RN2903_RESPONSE_T radioRx | ( | int | window_size | ) |
Receive a packet. This method uses the radio directly without the LoRaWAN stack running. For this reason, you must call macPause() before trying to receive using this function. You should also configure any parameters (frequency, etc) to match the transmitter before calling this function.
| window_size | An integer that represents the number of symbols to wait for (lora) or the maximum number of milliseconds to wait (fsk). This parameter is passed to the "radio rx" command. Passing 0 causes the radio to enter continuous receive mode which will return when either a packet is received, or the radio watchdog timer expires. See the RN2903 Command Reference for details. |

| std::string getHardwareEUI | ( | ) |
Return the Hardware Extended Unique Identifier (EUI). The is a 16 byte hex encoded string representing the 64b hardware EUI. This value cannot be changed, and is globally unique to each device. It is obtained from the device at initialization time.

| void updateMacStatus | ( | ) |
Retrieve the device MAC status, decode it, and store it internally. This function must be called prior to calling getMacStatusWord() or getMacStatus().
| std::runtime_error | if the mac get command failed |

| int getMacStatusWord | ( | ) |
Retrieve the MAC status word. updateMacStatus() must have been called prior to calling this function.

| RN2903_MAC_STATUS_T getMacStatus | ( | ) |
Retrieve the MAC status. updateMacStatus() must have been called prior to calling this function. The MAC status is a bitfield embedded in the mac status word. It provides information on the status of the internal MAC state machine.

| void macSave | ( | ) |
Save the configurable device values to EEPROM. These values will be reloaded automatically on a reset or power up.
The data that can be saved are: deveui, appeui, appkey, nwkskey (Network Session Key), appskey, devaddr, channels, upctr (Uplink Counter), dnctr (Downlink Counter), adr (automatic data-rate) state, and rx2 (the RX2 receive window parameters).
| std::runtime_error | if the mac save command failed |

| void macPause | ( | ) |
Pause the MAC LoRaWAN stack. This device can operate in one of two modes.
The most common mode is used to join and participate in a LoRaWAN network as a Class A End Device. This is handled by the MAC LoRaWAN stack on the device dealing with the details of LoRaWAN participation automatically.
The other mode disables MAC LoRaWAN stack functionality and allows you to issue commands directly to the radio to set frequencies, data rates, modulation and many other parameters.
Calling this function disables the MAC LoRaWAN stack and allows you to issue radio commands that are otherwise handled automatically.
When pausing, the maximum allowable pause time in milliseconds will be returned in the response buffer. You can grab this value by calling getResponse() after this function completes successfully.
When the MAC is idle (getMacStatus()), you can pause the stack indefinitely.
| std::runtime_error | if the mac pause command failed |

| void macResume | ( | ) |
Resume the MAC LoRaWAN stack. Call this to resume MAC LoRaWAN operation after having called macPause(), to resume participation in a LoRaWAN network.
| dev | Device context |
| std::runtime_error | if the mac resume command failed |

| void reset | ( | ) |
Reset the device. Any configuration is lost, as well as the current join status. This method also calls setBaudrate() after the reset to re-establish communications with the device in the event you are not using the default baudrate (which the device will revert to after a reset).
| std::runtime_error | if the mac reset, or setBaudrate() command fails |

| void macSetBattery | ( | int | level | ) |
LoRaWAN communications allows for the reporting of current battery charge remaining to the LoRaWAN gateway/network server. This function allows you to specify the value that should be reported.
The valid values are from 0 to 255. 0 = using external power 1(low) to 254(high) = battery power 255 = unable to measure battery level
| level | The battery level value from 0-255 |
| std::runtime_error | if the mac set bat command failed, or if the battery level is invalid |

| void setDebug | ( | bool | enable | ) |
Enable debugging. If enabled, commands will be printed out before being sent to the device. Any responses will be printed out after retrieval. Other miscellaneous debug output will also be printed.
| enable | true to enable debugging, false otherwise |

| void setBaudrate | ( | unsigned int | baudrate | ) |
Set the baudrate of the device. Auto-bauding is currently only supported on Linux (due to the need to send a break signal) and only on a recent MRAA which supports it (> 1.6.1). If on a non-linux OS, you should not try to change the baudrate to anything other than the default 57600 or you will lose control of the device.
| baudrate | The baud rate to set for the device |
| std::runtime_error | if the autobaud test command failed |

| void setFlowControl | ( | RN2903_FLOW_CONTROL_T | fc | ) |
Set a flow control method for the UART. By default, during initialization, flow control is disabled. The device MAY support hardware flow control, but MRAA does not (at least for UART numbers), so we can't either. We leave the option here though so that if you are using a TTY (as opposed to a UART instance) it might work if the device is also configured to use hardware flow control.
| fc | One of the RN2903_FLOW_CONTROL_T values |
| std::runtime_error | on failure |

| bool find | ( | const std::string | str | ) |
This is a utility function that can be used to indicate if a given string is present at the beginning of the response buffer. The search is case sensitive.
| str | The string to search for |

| std::string getRadioRxPayload | ( | ) |
This is a utility function that can be used to return the hex encoded payload string for radio_rx messages received.

| bool autobaud | ( | int | retries | ) |
This function attempts to sync the device to the current baudrate. It tries retries times, to send an autobaud sequence to the device and run a test command.
| retries | The number of times to retry autobaud detection |

|
protected |
Read character data from the device
| size | The maximum number of characters to read |

|
protected |
Write character data to the device
| buffer | The string containing the data to write |

 1.8.11
1.8.11


