|
upm
0.8.0
Sensor/Actuator repository for libmraa (v1.1.1)
|


All Data Structures Namespaces Files Functions Variables Typedefs Enumerations Enumerator Macros Groups Pages
|
upm
0.8.0
Sensor/Actuator repository for libmraa (v1.1.1)
|
API for the BMC150 6-axis eCompass. More...
The BMC150 is an integrated electronic compass solution for consumer market applications. It comprises a 12bit leading edge triaxial, low-g acceleration sensor and an ultra-low power, high precision triaxial magnetic field sensor. It allows measurements of acceleration and magnetic field in three perpendicular axes. Performance and features of both sensing technologies are carefully tuned and perfectly match the demanding requirements of all 6-axis mobile applications such as electronic compass, navigation or augmented reality.
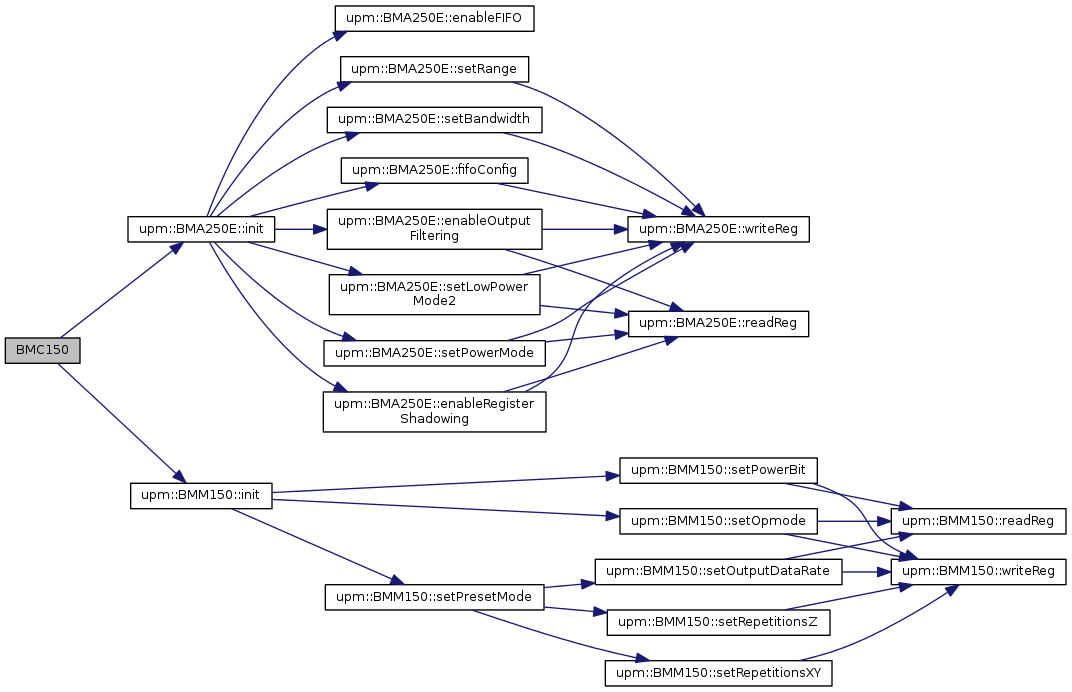
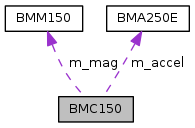
The BMC150 is essentially 2 separate devices in one: the BMA250E Accelerometer and the BMM150 Magnetometer. They are completely independant of each other.
This driver provides a very simple interface to these 2 devices. If finer control is desired, you should just use the separate BMA25E and BMM150 device classes directly. This driver simply initializes both devices, and provides a mechanism to read accelerometer and magnetometer data from them.
Public Member Functions | |
| BMC150 (int accelBus=BMC150_DEFAULT_BUS, int accelAddr=BMC150_DEFAULT_ACC_ADDR, int accelCS=-1, int magBus=BMC150_DEFAULT_BUS, int magAddr=BMC150_DEFAULT_MAG_ADDR, int magCS=-1) | |
| ~BMC150 () | |
| void | update () |
| void | initAccelerometer (BMA250E::POWER_MODE_T pwr=BMA250E::POWER_MODE_NORMAL, BMA250E::RANGE_T range=BMA250E::RANGE_2G, BMA250E::BW_T bw=BMA250E::BW_250) |
| void | initMagnetometer (BMM150::USAGE_PRESETS_T usage=BMM150::USAGE_HIGH_ACCURACY) |
| void | getAccelerometer (float *x, float *y, float *z) |
| float * | getAccelerometer () |
| void | getMagnetometer (float *x, float *y, float *z) |
| float * | getMagnetometer () |
Protected Attributes | |
| BMA250E * | m_accel |
| BMM150 * | m_mag |
| BMC150 | ( | int | accelBus = BMC150_DEFAULT_BUS, |
| int | accelAddr = BMC150_DEFAULT_ACC_ADDR, |
||
| int | accelCS = -1, |
||
| int | magBus = BMC150_DEFAULT_BUS, |
||
| int | magAddr = BMC150_DEFAULT_MAG_ADDR, |
||
| int | magCS = -1 |
||
| ) |
BMC150 constructor.
This device can support both I2C and SPI. For SPI, set the addr to -1, and specify a positive integer representing the Chip Select (CS) pin for the cs argument. If you are using a hardware CS pin (like edison with arduino breakout), then you can connect the proper pin to the hardware CS pin on your MCU and supply -1 for cs. The default operating mode is I2C.
| accelBus | I2C or SPI bus to use. -1 to skip initializing this device. |
| accelAddr | The address for this device. -1 for SPI. |
| accelCS | The gpio pin to use for the SPI Chip Select. -1 for I2C or for SPI with a hardware controlled pin. |
| magBus | I2C or SPI bus to use. -1 to skip initializing this device. |
| magAddr | The address for this device. -1 for SPI. |
| magCS | The gpio pin to use for the SPI Chip Select. -1 for I2C or for SPI with a hardware controlled pin. |
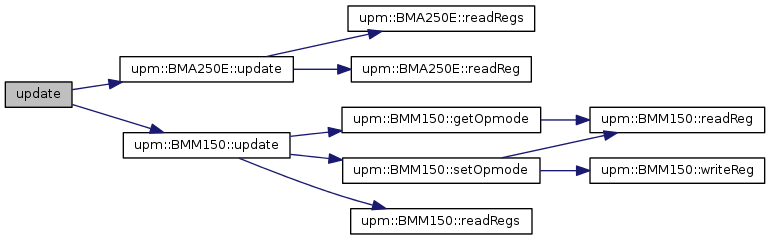
| void update | ( | void | ) |
Update the internal stored values from sensor data.
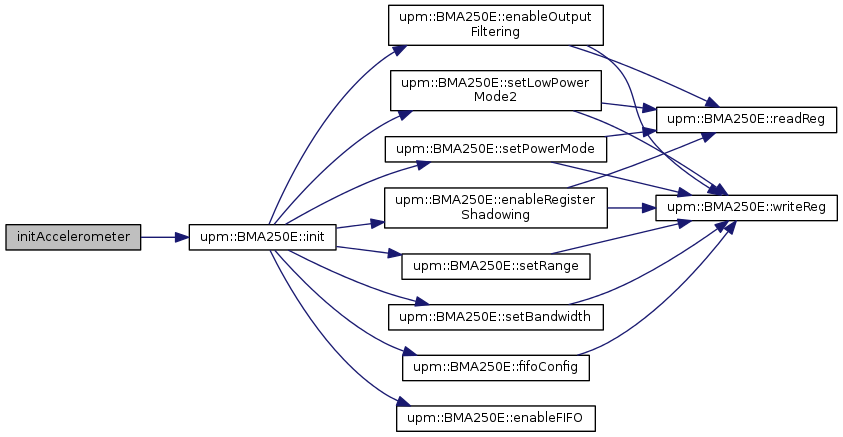
| void initAccelerometer | ( | BMA250E::POWER_MODE_T | pwr = BMA250E::POWER_MODE_NORMAL, |
| BMA250E::RANGE_T | range = BMA250E::RANGE_2G, |
||
| BMA250E::BW_T | bw = BMA250E::BW_250 |
||
| ) |
Initialize the accelerometer and start operation. This function is called from the constructor so will not typically need to be called by a user unless the device is reset or you want to change these values.
| pwr | One of the BMA250E::POWER_MODE_T values. The default is BMA250E::POWER_MODE_NORMAL. |
| range | One of the BMA250E::RANGE_T values. The default is BMA250E::RANGE_2G. |
| bw | One of the filtering BMA250E::BW_T values. The default is BMA250E::BW_250. |
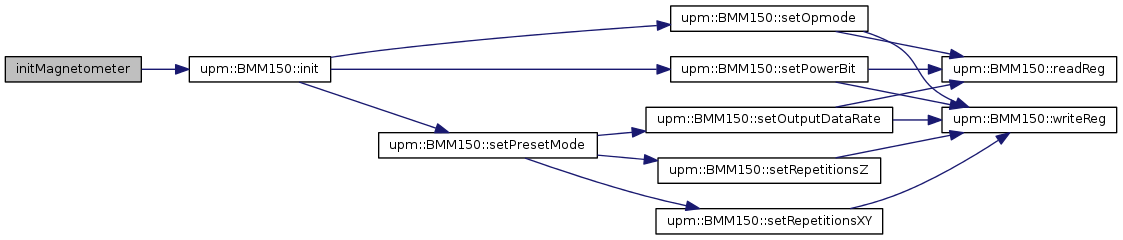
| void initMagnetometer | ( | BMM150::USAGE_PRESETS_T | usage = BMM150::USAGE_HIGH_ACCURACY | ) |
Initialize the magnetometer and start operation. This function is called from the constructor so will not typically need to be called by a user unless the device is reset or you want to change these values. This method will call BMM150::setPresetMode() with the passed parameter.
| usage | One of the BMM150::USAGE_PRESETS_T values. The default is BMM150::USAGE_HIGH_ACCURACY. |
| void getAccelerometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
Return accelerometer data in gravities. update() must have been called prior to calling this method.
| x | Pointer to a floating point value that will have the current x component placed into it. |
| y | Pointer to a floating point value that will have the current y component placed into it. |
| z | Pointer to a floating point value that will have the current z component placed into it. |

| float * getAccelerometer | ( | ) |
Return accelerometer data in gravities in the form of a floating point array. The pointer returned by this function is statically allocated and will be rewritten on each call. update() must have been called prior to calling this method.

| void getMagnetometer | ( | float * | x, |
| float * | y, | ||
| float * | z | ||
| ) |
Return magnetometer data in micro-Teslas (uT). update() must have been called prior to calling this method.
| x | Pointer to a floating point value that will have the current x component placed into it. |
| y | Pointer to a floating point value that will have the current y component placed into it. |
| z | Pointer to a floating point value that will have the current z component placed into it. |

| float * getMagnetometer | ( | ) |
Return magnetometer data in micro-Teslas (uT) in the form of a floating point array. The pointer returned by this function is statically allocated and will be rewritten on each call. update() must have been called prior to calling this method.

 1.8.6
1.8.6