|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
|
upm
1.7.1
Sensor/Actuator repository for libmraa (v2.0.0)
|
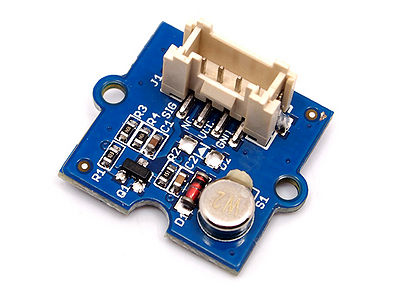
API for the Grove Collision Sensor. More...
The Grove Collision Sensor can detect whether any collision movement or vibration happens. It outputs a low pulse signal when vibration is detected.
Public Member Functions | |
| GroveCollision (int pin) | |
| ~GroveCollision () | |
| bool | isColliding () |
| GroveCollision | ( | int | pin | ) |
Grove collision sensor constructor
| pin | Digital pin to use |
| ~GroveCollision | ( | ) |
GroveCollision destructor
| bool isColliding | ( | ) |
 1.8.11
1.8.11

